关闭定位服务:在不需要GPS定位的应用中暂时关闭,如地图导航。 #生活技巧# #数码产品使用技巧# #电子设备续航优化#
航位推算法在导航定位中应用
最新推荐文章于 2024-09-08 10:33:57 发布

 try_again_later 于 2017-10-23 21:47:00 发布
try_again_later 于 2017-10-23 21:47:00 发布
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
一、组合定位技术
对于车辆定位来说,常用的定位方式有GPS和航位推算(DR)两种。车辆定位,导航中,由于山区丛林、隧道、高架桥等障碍导致反射卫星信号严重的多径效应,无法获得准确的车辆定位信息,为解决该问题,在车辆上加装航行传感器和距离传感器,通过DR算法自主确定定位信息,DR算法具有短时间内局部高精度定位特点;DR推算过程是一个信息累加的过程,定位误差会随着时间推移累积加大,因此需要结合GPS卫星信号校准车辆位置和运动方向,这便是组合定位技术。
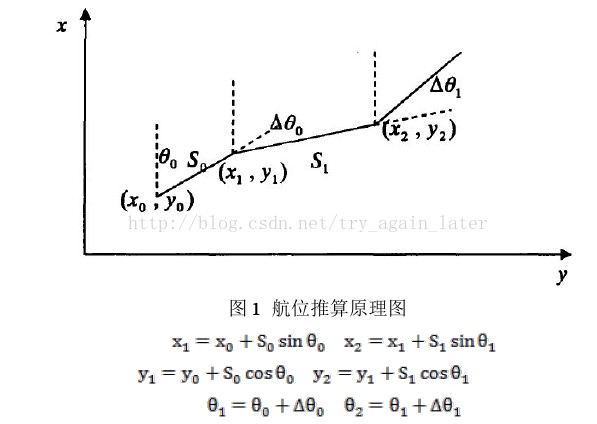
二、航位推算(DR)算法
1、本质:在初始位置上累加位移矢量计算当前位置,它是一个信息累加的过程。
常用传感器有:码盘(类似于车辆里程计,记录车轮转数,获得机器人相对于上一采样时刻状态改变量)
惯性传感器(如陀螺仪、加速度计,得到机器人角速度线速度,通过积分获得机器人位置信息)
2、双轮差动驱动小车为例
在定位机器人两个轮上安装独立的驱动电机,通过控制电机的转速比控制小车的运动。
网址:航位推算法在导航定位中应用 https://www.yuejiaxmz.com/news/view/411544
相关内容
导航定位的手机app大全室内停车场定位导航解决方案停车场室内定位导航系统,空闲车位一键导航、反向寻车停车场电子地图系统结合室内定位导航实现停车及车位导航高德地图公交导航肿么用?高德地图公交导航GPS定位使用教程SLAM+运动规划=机器人自主定位导航车位智能导航屏怎么用—停车场智能导航系统出行,手机工具,导航,定位地下停车场导航:快速定位爱车,提升停车体验基于WiFi室内定位的地下停车场智能导航系统.doc
随便看看

