基于家庭安全移动式监护系统的设计与实现(大创)
家庭安全监控系统的基本设置和报警处理 #生活技巧# #居家生活技巧# #家庭护理技巧# #家庭自动化设备#
1 课题研究背景、意义以及项目创新
1.1 课题研究背景
近些年,由于人口老龄化的持续加剧,集辅助和防护功能于一体的智能安防机器人已经成为研究热点。智能安全机器人可以连接各种智能家庭环境中的智能及非智能电子设备,方便老人与病人使用。它使老年人能够达到独立生活并提供相应的安全保证,即使在没有其他人参与或只有少量人参与的情况下。而这就要求智能机器人能在各种设备之间转移,可实现自主移动和智能避障,并且只占用很小的空间等。其中智能避障系统不仅扮演着重要角色,而且更是整个系统运行的基础和前提。
跨入21世纪后,随着电子技术的不断提升,无论是高性能的处理芯片,还是高分辨率的摄像头,在我们的身边随处可见,我们已经习惯了与这些电子产品相处,通过现代技术进一步解放我们的生活。正所谓,科技改变生活。正是这些技术的发展使我们进入了一个新的时代,同时技术的产生和发展都会更好地服务我们的生活,利用高新技术去解决人类社会发展中遇到的种种问题,才是我们这些科技工作者一直努力的方向。
近些年机器人技术一直是许多科技工作者的研究方向,使得机器人更加的智能化和数字化是研究者们一直以来努力的目标。通过一代又一代科技人员的不断研究与创新,智能机器人发展愈发成熟,我们可以看到现在的工厂更愿意选择工业机器人来代替人工劳动力,不仅降低了劳动成本,同时还可以提升生产效率。尤其是在汽车制造领域或者一些大型流水线上机器人的使用已经是很常见的事情。而为我们的生活也提供了多样化的机器人服务,从各种陪孩子学习的智能机器人,再到各种扫地、洗衣、做饭的智能机器人,它们成为了生活中不可分割的一部分。
1.2 课题研究意义
智能机器人之所以可以越来越强大,一方面得益于数字芯片的高速处理能力,另一方面得益于种类繁多的传感器。传感器如同机器人的感官器官,负责获取未知环境信息。而数字芯片就好比机器人的大脑,负责处理各种外界信息。对于智能机器人而言,获取外界信息是一切工作的前提,而这些信息可以来源于视觉、听觉、触觉、味觉等。作为获取外部环境信息的重要手段,视觉有着天然的优势。
但是尽管近些年通过对障碍物检测、识别等算法的不断研究和优化,基于视觉技术设计的避障系统也取得了一定的成绩。然而,想要机器人在周围环境未知的情况下,执行复杂的设定任务,如何实现对动态与静态物体的实时避障是智能避障机器人技术的关键。对于人类来说,视觉系统为人类获取信息提供了重要方式。在智能机器人实际应用中的导航和避障过程中,为了实现实时性,我们不需要像人类视觉一样来区分不同的外界事物,简单的避障只需区分可行的区域和障碍物,获取障碍物的深度信息,因此智能避障系统的设计主要是针对各种道路场景的理解,为机器人提供能够快速识别和检测障碍物以及计算可行区域的能力。
研究智能避障系统有助于推进机器人技术不断发展,促进技术改革升级;与此同时,智能避障系统在工业和军事领域的产业的实际应用也愈加频繁。智能避障系统的不断成熟必然会促进社会生产、生活效率的大大提高。因此,非常有必要对智能避障系统进行深入研究。
目前,仍有一些视觉避障技术难题急需解决,如数据量大,实时性差,易受光线影响等问题;该论文基于室内复杂环境特点,提出通过对室内环境的LAB色彩空间特征进行数据分析,并根据小孔成像原理建立智能小车与空间障碍物之间的几何模型,能够有效减少图像分析的数据量并降低系统的光线敏感度,其能够很大水平上提高了避障系统的实时性能。同时通过视觉技术获取被监控目标人物的实时信息,并利用图像处理算法将目标人物从背景中分离出来,实现对目标人物的跟踪,并通过对目标人物的行为检测,来实现对人摔倒过程的识别并自动报警。
1.3 项目实施的创新与特色
目前基于视觉的家庭安全监护的系统很多,但大多都是固定式安装,成本高、灵活性较差,对于一些突发情况无法预知并及时预警,总体智能性不高。
本系统以移动小车平台为载体,在主体硬件方面采用STM32微处理器为核心的开发板,此开发板可为小车移动平台提供三路直流电机驱动,为摄像头OV7725提供5V/3.3V电源接口以及图像传输所需IIC接口,并配备OLED显示屏及JLINK接口,方便人机交互与程序调试。软件方面采用MicroPython系统可以通过Python脚本语言开发单片机程序,同时使用Opencv3.4.3以及其他图像处理库,可以缩短系统开发时间,提高系统开发效率。
以实验平台为基础,“基于移动式家庭安全监护系统”可以分为四个模块,图像视觉模块、图像处理模块、运动分析决策模块、机器控制执行模块。分别负责环境感知、目标提取、行为检测、跟踪报警,从而形成一套完整的监护系统。
与传统安全监护相比其具有低成本、高灵活性等优势,并结合视觉传感器信息丰富的特点,深度解析周围环境信息,能够实现移动小车基于室内环境的自主行进能力。通过机器人对目标的跟踪,即保证了对目标的实时监控,又节约了成本。同时利用对目标的行为检测,实现自动报警,解决了被监护人失去报警能力时,家属不能及时知晓的尴尬问题发生。
2 项目基本情况
2.1 项目进程
2018年7月–8月,查阅文献,搜集相关资料等。
2018年9月–10月,制定设计方案,对方案的可行性进行初步验证,并对方案进行更改确定方案。
2018年11月–2019年4月, 设计调试摄像头以及小车主控的各个模块,完成实体部分并调试系统的可靠性、稳定性以及实用性,发表研究论文。
2019年5月,撰写结题材料,完成论文以及项目研究总结报告,结题。
2.2 项目研究内容
1.在现有研究的基础上,如何在未知环境下更加有效的检测出障碍物并对静态和动态两种障碍物进行准确区分。
2.为了获取障碍物与小车之间的位置分布关系,需要研究如何从图像中提取出障碍物与小车之间距离的深度信息,来实现对障碍物的定位。
3.要实现最后的自主避障,还需要研究如何判断当前环境下机器人的可行区域以及实现较优或最优的路径规划。
4.为了获得监测对象实时状态,需要研究如何检测并跟踪特定目标。
5.在实现特定目标检测后,需要研究如何能够检测出目标是否发生摔倒。
3 项目具体情况
3.1 运动学分析
三轮全向移动机器人是一种可以通过自身的运动机构并借助控制系统的帮助到达指定位置或者沿指定轨迹运动的机器人。因其全方位移动的特性,其在工业、医药等领域都有着广泛的应用。因此,本系统采用三轮全向结构,不仅使系统具有高度的灵活型,而且通过运动学分析能够实现控制智能小车向任意方向运动以及向任意角度旋转。
3.1.1 运动建模为了实现对智能小车运动方向及速度的精准化控制,此小节将会结合小车硬件结构,通过对移动部分的硬件结构进行基础的运动学分析,利用几何关系导出小车在运动过程中的关键参数,然后利用程序语言,对其实际结论进行验证;为进一步简化数学模型,减少不必要的影响因素,做出以下几条假设:
(1)忽略地面摩擦力对系统的影响;(2)电机轴线中心正是底盘重心;(3)各轮之间是绝对的互成 120°安装。
如图3.1所示,对智能小车的移动方向做出规定。 
通过简单的速度分解,可以得到以下公式:
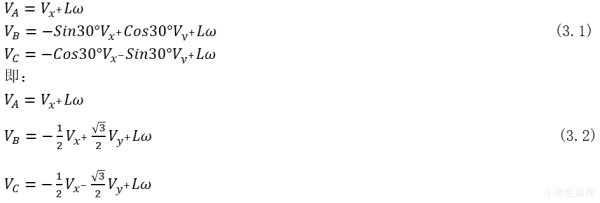
ω为智能避障小车的角速度,L为全向轮中心与底盘中心的距离, V A 、 V B 、 V C V_A、V_B、V_C VA、VB、VC分别为 3 个轮子的转速, V x 、 V y V_x、V_y Vx、V
网址:基于家庭安全移动式监护系统的设计与实现(大创) https://www.yuejiaxmz.com/news/view/132902
相关内容
基于Android的家庭理财系统的设计与实现基于GSM的家庭安防系统设计
基于stm32的家庭安全监测系统
【开题报告】基于Spring Boot的家庭菜谱系统设计与实现
【毕业设计】基于Java的个人记账系统的设计与实现
【开题报告】基于微信小程序的个人健康监测系统的设计与实现
基于 asp.net家庭财务管理系统设计与实现
【DIY】基于STM32智能家居系统的设计与实现
基于物联网的家庭安全管理系统.pdf
多传感器融合的人体健康监测系统设计与实现
随便看看
最新动态分享
- 简洁又高级的工业风装修,回归生活本真
- 工业风:打造独具特色的服装店
- 冷淡的工业风装修受到年轻人的追棒
- 看看人家的工业风风装修,88平米房子13万就够, 这就是我们向往的生活。
- 炫酷装修!2018最个性工业风格装修,看过才知道家可以如此COOOL
- 装修实景丨160㎡轻奢风loft,向往两只猫主子的惬意生活
- 现在社会房子装修风格越来越多样,如何打造工业风家装设计
- 碟片墙装修效果图
- 45平loft工业风装修,阳光客厅很惊艳,适合小两口居住!
- 不刷墙、不吊顶装出来的新房居然如此迷人,教你如何用超低预算打造个性工业风!
热点动态分享
- 2847
- 2714
- 2704
- 2372
- 2220
- 1845
- 1654
- 1501
- 1409
- 1315

