深度清扫的方法、扫地机器人及计算机可读存储介质与流程
吸尘器与扫地机器人:深度清洁与日常清扫,分工合作. #生活技巧# #家电使用技巧# #厨房电器搭配攻略#
本发明涉及扫地机器人领域,尤其涉及一种深度清扫的方法、扫地机器人及计算机可读存储介质。
背景技术:
1、智能扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在室内和室外内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成拖地、吸尘、擦地工作的机器人,也统一归为智能扫地机器人,现有的扫地机器人包括拖布,在扫地机器人清扫过程中,拖布能够实现拖地的效果,也即是说,智能扫地机器人不仅具有扫地的功能,还具备有拖地的功能,提升了智能扫地机器人的多功能化,提升了用户的体验。
2、一般的,当智能扫地机器人接受到全局清任务指令后,智能扫地机器人需要执行不同区域的清扫操作,由于清扫区域较大或清扫面积过长,在清扫过程中可能存在相同地图,由于清扫时间间隔较长,清扫区域存在脏污情况,通常全局清扫即为单次全局清扫操作,无法满足不同区域的脏污清扫要求,将影响清扫效果和清扫效率。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种深度清扫的方法、扫地机器人及计算机可读存储介质,以解决现有技术中的扫地机器人的清扫模式单一导致扫地机器人针对不同的情况下,清洁效果不佳的问题。
2、本发明实施方式提供一种深度清扫的方法,用于扫地机器人,所述深度清扫的方法包括:
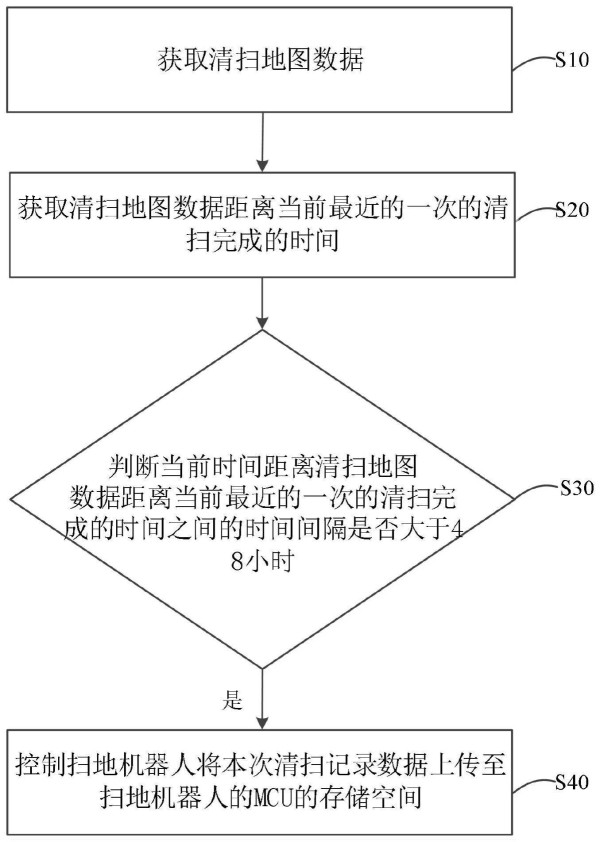
3、获取清扫地图数据;
4、获取所述清扫地图数据距离当前最近的一次的清扫完成的时间;
5、判断所述当前时间距离所述清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是否大于48小时;
6、若是,控制所述扫地机器人进行深度清扫模式。
7、本发明的深度清扫的方法,在获取清扫地图数据之后,然后回获取清扫地图数据距离当前最近的一次的清扫完成的时间,然后判断当前时间距离清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是否大于48小时,在判断当前时间距离清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是大于48小时的情况下,会控制扫地机器人进行深度清扫模式。也即是说,扫地机器人在判断当前需要清扫的区域距离上一次清扫完成的时间大于48小时的情况下,此时,则说明需要清扫的区域的脏污程度较高,采用传统清扫模式会大大降低清扫的洁净度,此时,可以控制扫地机器人开启深度清扫模式,通过深度清扫模式能够实现较好的清洁,提升扫地机器人的智能化,提高了用户的体验度。
8、进一步地,所述若是,控制所述扫地机器人进行深度清扫模式之后,包括:
9、获取所述扫地机器人的当前电量;
10、判断所述当前电量是否大于65%;
11、若否,控制所述扫地机器人返回基站充电。
12、进一步地,所述若否,控制所述扫地机器人返回基站充电,包括:
13、判断所述扫地机器人是否位于基站内;
14、若否,判断所述扫地机器人是否处于损坏状态;
15、若否,控制所述扫地机器人返回基站内并充电。
16、进一步地,所述判断所述当前电量是否大于65%,包括:
17、获取所述扫地机器人的水箱的当前剩余水量;
18、判断所述当前剩余水量是否大于65%;
19、若否,控制所述扫地机器人返回基站补水。
20、进一步地,所述若否,控制所述扫地机器人返回基站补水,包括:
21、判断所述扫地机器人是否位于基站内;
22、若否,判断所述扫地机器人是否处于损坏状态;
23、若否,控制所述扫地机器人返回基站内并补水。
24、进一步地,所述判断所述当前剩余水量是否大于65%,包括:
25、根据拖布脏污计算公式获取所述扫地机器人的拖布的脏污程度;
26、判断所述拖布的脏污程度是否大于30%;
27、若是,控制所述扫地机器人返回基站进行自清洁操作。
28、进一步地,所述判断所述拖布的脏污程度是否大于30%,包括:
29、若否,获取所述拖布的工作时长;
30、判断所述拖布的工作时长是否大于80小时;
31、若否,控制所述扫地机器人对所述清扫地图数据根据所述深度清扫模式进行清扫。
32、进一步地,所述判断所述拖布的工作时长是否大于80小时,包括:
33、若是,控制所述扫地机器人发出语音提示告知用户需要更换拖布。
34、本发明实施方式提供一种扫地机器人,所述扫地机器人包括:
35、第一获取模块,所述第一获取模块用于获取清扫地图数据;
36、第二获取模块,所述第二获取模块用于获取所述清扫地图数据距离当前最近的一次的清扫完成的时间;
37、判断模块,所述判断模块用于判断所述当前时间距离所述清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是否大于48小时;
38、控制模块,所述控制模块用于在偶数术判断模块判断所述当前时间距离所述清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是大于48小时的情况下,控制所述扫地机器人进行深度清扫模式。
39、本发明的扫地机器人,在获取清扫地图数据之后,然后回获取清扫地图数据距离当前最近的一次的清扫完成的时间,然后判断当前时间距离清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是否大于48小时,在判断当前时间距离清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是大于48小时的情况下,会控制扫地机器人进行深度清扫模式。也即是说,扫地机器人在判断当前需要清扫的区域距离上一次清扫完成的时间大于48小时的情况下,此时,则说明需要清扫的区域的脏污程度较高,采用传统清扫模式会大大降低清扫的洁净度,此时,可以控制扫地机器人开启深度清扫模式,通过深度清扫模式能够实现较好的清洁,提升扫地机器人的智能化,提高了用户的体验度。
40、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述深度清扫的方法。
41、本发明的计算机可读存储介质,在获取清扫地图数据之后,然后回获取清扫地图数据距离当前最近的一次的清扫完成的时间,然后判断当前时间距离清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是否大于48小时,在判断当前时间距离清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是大于48小时的情况下,会控制扫地机器人进行深度清扫模式。也即是说,扫地机器人在判断当前需要清扫的区域距离上一次清扫完成的时间大于48小时的情况下,此时,则说明需要清扫的区域的脏污程度较高,采用传统清扫模式会大大降低清扫的洁净度,此时,可以控制扫地机器人开启深度清扫模式,通过深度清扫模式能够实现较好的清洁,提升扫地机器人的智能化,提高了用户的体验度。
技术特征:
1.一种深度清扫的方法,其特征在于,用于扫地机器人,所述深度清扫的方法包括:
2.如权利要求1所述的深度清扫的方法,其特征在于,所述若是,控制所述扫地机器人进行深度清扫模式之后,包括:
3.如权利要求2所述的深度清扫的方法,其特征在于,所述若否,控制所述扫地机器人返回基站充电,包括:
4.如权利要求2所述的深度清扫的方法,其特征在于,所述判断所述当前电量是否大于65%,包括:
5.如权利要求4所述的深度清扫的方法,其特征在于,所述若否,控制所述扫地机器人返回基站补水,包括:
6.如权利要求4所述的深度清扫的方法,其特征在于,所述判断所述当前剩余水量是否大于65%,包括:
7.如权利要求6所述的深度清扫的方法,其特征在于,所述判断所述拖布的脏污程度是否大于30%,包括:
8.如权利要求7所述的深度清扫的方法,其特征在于,所述判断所述拖布的工作时长是否大于80小时,包括:
9.一种扫地机器人,其特征在于,所述扫地机器人包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述深度清扫的方法的步骤。
技术总结
本发明公开了一种深度清扫的方法、扫地机器人及计算机可读存储介质,方法包括:获取清扫地图数据;获取清扫地图数据距离当前最近的一次的清扫完成的时间;判断当前时间距离清扫地图数据距离当前最近的一次的清扫完成的时间之间的时间间隔是否大于48小时;若是,控制扫地机器人进行深度清扫模式。也即是说,扫地机器人在判断当前需要清扫的区域距离上一次清扫完成的时间大于48小时的情况下,此时,则说明需要清扫的区域的脏污程度较高,采用传统清扫模式会大大降低清扫的洁净度,此时,可以控制扫地机器人开启深度清扫模式,通过深度清扫模式能够实现较好的清洁,提升扫地机器人的智能化,提高了用户的体验度。
技术研发人员:羊气仕,张钰峰,赵传涛
受保护的技术使用者:深圳市普森斯科技有限公司
技术研发日:
技术公布日:2024/1/15
网址:深度清扫的方法、扫地机器人及计算机可读存储介质与流程 https://www.yuejiaxmz.com/news/view/167308
相关内容
砧板消毒机、控制方法、控制装置及可读存储介质与流程立体清洁深度打扫 松下扫地机器人热销
扫地机器人使用方法与技巧
米家扫地机器人
高智高效的扫地清洁神器 科沃斯DEEBOT N3扫地机器人评测
基于STM32的智能扫地机器人设计
【扫地机器人报价】扫地机器人价格行情
由利V980PLUS扫地机器人
扫地机器人哪个好
扫地机器人
随便看看
最新动态分享
- 锅底发黑怎么办?过碳酸钠洗去除顽固污渍!
- 去除顽固污渍!为什么醋和小苏打是清洁污渍的最佳选择?
- 小苏打白醋神奇组合,10分钟轻松去除马桶顽固黄渍
- 超值!3.99元体验2斤爆炸盐,去污渍如此简单?
- 养猫新手指南,为什么养猫要单数?
- 不锈钢锅顽固污渍难去除,别再只会用钢丝球猛刷了,教你几招,轻松除污,干净不伤锅
- 厨房一点通:厨房顽固污渍清洁十大妙招
- 想要轻松去除厨房里的顽固污渍,身边这些常用物品是神器!
- 家里厨房灶具、抽油烟机上顽固污渍的去除家里厨房灶具、抽油烟机上积 爱问知识人
- 苏诺 高密纳米海绵擦抹布去除顽固污渍厨房清洁魔力擦百洁布大号12片 17.91元
热点动态分享
- 2841
- 2703
- 2699
- 2371
- 2219
- 1845
- 1654
- 1501
- 1407
- 1315

