学习笔记ROS(moveit 工作空间运动规划
Notion全能型笔记平台,可定制化工作和学习空间 #生活技巧# #工作学习技巧# #知识管理工具#
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy, sys
import moveit_commander
from moveit_msgs.msg import RobotTrajectory
from trajectory_msgs.msg import JointTrajectoryPoint
from geometry_msgs.msg import PoseStamped, Pose
from tf.transformations import euler_from_quaternion, quaternion_from_euler
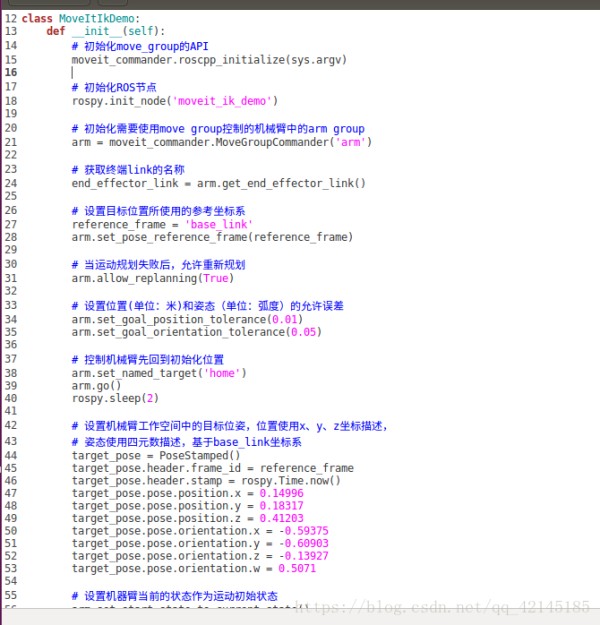
class MoveItIkDemo:
def __init__(self):
# 初始化move_group的API
moveit_commander.roscpp_initialize(sys.argv)
# 初始化ROS节点
rospy.init_node('moveit_ik_demo')
# 初始化需要使用move group控制的机械臂中的arm group
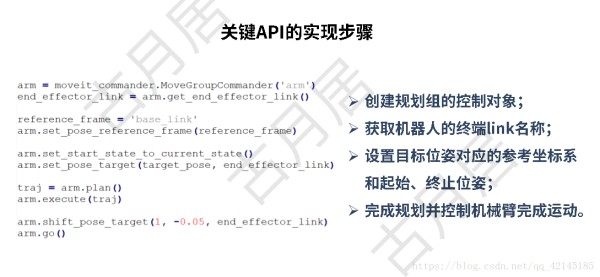
arm = moveit_commander.MoveGroupCommander('arm')
# 获取终端link的名称
end_effector_link = arm.get_end_effector_link()
# 设置目标位置所使用的参考坐标系
reference_frame = 'base_link'
arm.set_pose_reference_frame(reference_frame)
# 当运动规划失败后,允许重新规划
arm.allow_replanning(True)
# 设置位置(单位:米)和姿态(单位:弧度)的允许误差
arm.set_goal_position_tolerance(0.01)
arm.set_goal_orientation_tolerance(0.05)
# 控制机械臂先回到初始化位置
arm.set_named_target('home')
arm.go()
rospy.sleep(2)
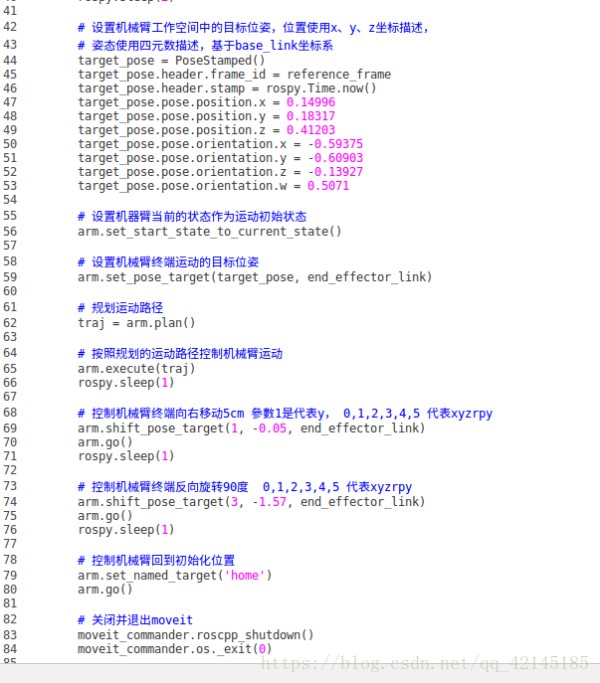
# 设置机械臂工作空间中的目标位姿,位置使用x、y、z坐标描述,
# 姿态使用四元数描述,基于base_link坐标系
target_pose = PoseStamped()
target_pose.header.frame_id = reference_frame
target_pose.header.stamp = rospy.Time.now()
target_pose.pose.position.x = 0.14996
target_pose.pose.position.y = 0.18317
target_pose.pose.position.z = 0.41203
target_pose.pose.orientation.x = -0.59375
target_pose.pose.orientation.y = -0.60903
target_pose.pose.orientation.z = -0.13927
target_pose.pose.orientation.w = 0.5071
# 设置机器臂当前的状态作为运动初始状态
arm.set_start_state_to_current_state()
# 设置机械臂终端运动的目标位姿
arm.set_pose_target(target_pose, end_effector_link)
# 规划运动路径
traj = arm.plan()
# 按照规划的运动路径控制机械臂运动
arm.execute(traj)
rospy.sleep(1)
# 控制机械臂终端向右移动5cm 參數1是代表y, 0,1,2,3,4,5 代表xyzrpy
arm.shift_pose_target(1, -0.05, end_effector_link)
arm.go()
rospy.sleep(1)
# 控制机械臂终端反向旋转90度 0,1,2,3,4,5 代表xyzrpy
arm.shift_pose_target(3, -1.57, end_effector_link)
arm.go()
rospy.sleep(1)
# 控制机械臂回到初始化位置
arm.set_named_target('home')
arm.go()
# 关闭并退出moveit
moveit_commander.roscpp_shutdown()
moveit_commander.os._exit(0)
if __name__ == "__main__":
MoveItIkDemo()
网址:学习笔记ROS(moveit 工作空间运动规划 https://www.yuejiaxmz.com/news/view/223497
相关内容
古月居ros课件ROS机器人在家居领域的应用:打造智能家庭生活
提高学习效率——5R笔记法
有哪些好的工作习惯值得学习,管理者,工作,职场,管理,学习,规划,时间,时间管理,CIO之家
RL笔记:动态规划(1): 策略估计和策略提升
个人工作、生活、学习计划
日常学习生活工作计划
提升学习与工作效率的必备指南:高效使用笔记本的方法与技巧
ROS机器人在智能家居场景中的应用
个人学习生活工作目标计划(通用22篇)
随便看看
最新动态分享
- 洗一件衣服十种方法
- 保洁十大清洁秘籍
- 10个家庭保洁小窍门
- 10大家庭保洁秘籍:每天15分钟轻松打造清新空间|襄阳保洁|襄阳家政保洁|襄阳开荒保洁|襄阳家电清洗|襄阳保洁公司|襄阳家政
- 一站式学生社区生活百科栏目第6期|寝室卫生清洁秘籍
- 家居清洁秘籍:巧妙去除各类污渍,生活焕然一新
- 静谧生活有妙招:空调外机降噪秘籍大放送!
- 杭州全屋清洁收纳秘籍,打造舒适生活空间的秘密武器,专业上门保洁服务
- “宠物生活圈:养宠秘籍,一键收藏!”
- 优秀护士展爱笑+努力=幸运天使白晓静
热点动态分享
- 2819
- 2690
- 2604
- 2349
- 2205
- 1835
- 1651
- 1499
- 1392
- 1312

