毕业设计:基于机器学习的生活垃圾智能分类系统
智能垃圾分类系统让环保生活更轻松,垃圾分类知识普及化。 #生活知识# #生活感悟# #科技生活变迁# #生活便利#
目录
前言
设计思路
一、课题背景与意义
二、算法理论原理
2.1 卷积神经网络
2.2 目标检测算法
三、检测的实现
3.1 数据集
3.2 实验环境搭建
3.3 实验及结果分析
最后
前言
大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
对毕设有任何疑问都可以问学长哦!
选题指导:
最新最全计算机专业毕设选题精选推荐汇总
大家好,这里是海浪学长毕设专题,本次分享的课题是
基于机器学习的生活垃圾智能分类系统
设计思路
一、课题背景与意义
随着我国城市化进程的加快和居民生活水平的提高,生活垃圾的数量呈现急剧增长,传统的垃圾处理方式已经难以满足可持续发展的需求。基于机器学习的生活垃圾智能分类系统应运而生,它不仅可以大幅度提高垃圾的分类效率,降低处理成本,还能有效减少环境污染。该课题的研究和实现具有重要的现实意义和深远的环保价值,是智能家居和智慧城市建设中的重要组成部分。
二、算法理论原理
2.1 卷积神经网络卷积神经网络是深度学习中最具代表性的网络结构之一,其在图像处理领域取得了显著的成功。相较于传统的人工神经网络,卷积神经网络以二维矩阵形式处理图像数据,在每一层中通过卷积操作快速而准确地提取特征值。该网络结构的基本组成包括输入层、卷积层、池化层、全连接层和输出层。卷积层利用可学习的滤波器对图像数据进行局部感知,捕捉局部特征。池化层通过降低特征图尺寸和参数数量,保留主要特征并具备平移不变性。全连接层将池化层输出的特征向量与输出标签建立复杂关系,而输出层则根据任务选择适当的激活函数。通过层层堆叠和特征提取,卷积神经网络在图像处理中取得了巨大的成功,并成为深度学习中不可或缺的重要组成部分。
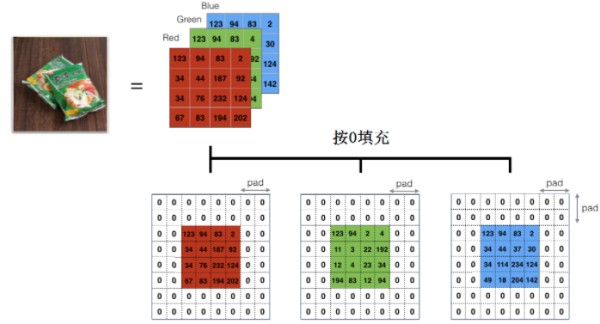
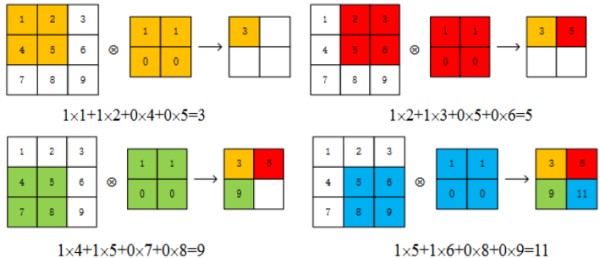
卷积层是卷积神经网络中至关重要的组件之一,通过卷积运算对输入图像进行特征提取。卷积层通过滑动窗口和加权求和的方式,以卷积核为模板,对局部图像区域进行局部感知和特征提取。通过堆叠多个卷积层,网络可以逐渐获得更高级、更抽象的特征信息。卷积层的优势在于其权重共享和局部连接的设计,减少了网络参数数量,提高了计算效率,并具备对平移、缩放和部分形变等变换的一定不变性。卷积神经网络中的卷积层在图像处理任务中取得了显著成功,广泛应用于图像分类、目标检测、语义分割等领域。它的设计和应用为深度学习在图像处理领域的应用提供了重要的基础,并推动了图像处理算法的发展和进步。
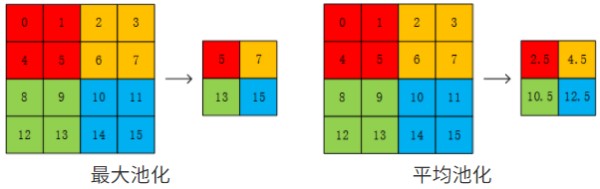
池化层是卷积神经网络中的关键组件之一,通常位于卷积层之后。它通过降采样的方式对特征图进行压缩和精简,以提取主要特征、减少参数数量,并抑制过拟合现象的发生。池化层还能增强网络对输入图像变形、扭曲和平移等操作的鲁棒性。池化层没有需要学习的参数,只需设定池化类型、窗口大小和步长。常用的池化类型有最大池化和均值池化。卷积层、池化层等操作都属于特征提取阶段,用于提取不同图像的特征,为正确的分类做准备。全连接层对特征图进行降维,将特征空间映射到样本标记空间,实现分类任务。池化层在卷积神经网络中起到了压缩特征图、提取主要特征、增强鲁棒性的作用,为图像识别等任务提供了重要的基础。
YOLOX是一种目标检测算法,在智能垃圾分类系统中具有广泛应用。其优势体现在实时性、准确性和轻量级上。YOLOX采用多尺度检测和自适应训练策略,能够快速准确地识别不同类型的垃圾物品。它具有高效的推理速度,能够在实时应用中提高垃圾处理的效率。此外,YOLOX的轻量级设计使其适用于资源受限的环境,能够以较低成本实现高效的目标检测和分类功能。YOLOX算法可以分为三个部分:Backbone骨干网络、Neck和Prediction。
在Backbone骨干网络部分,YOLOX使用Darknet53作为主干特征提取网络,并添加了SPP层。这个网络由52层卷积网络和1层1×1卷积实现的全连接层构成,用于提取输入图像的特征。Neck部分采用FPN结构,用于融合深层网络的抽象信息和浅层网络的具体信息,以进一步提取特征并提升模型对小目标的检测能力和整体精度。YOLOX网络模型中仍然使用了YOLOV4中的Panet结构,并应用上采样和下采样来实现特征融合。Prediction部分包括解耦头、无锚框检测器、标签分配策略SimOTA和损失计算。无锚框检测器通过减少人工设置参数,加快网络检测速度,同时提高准确率。解耦头的使用减少了通道维度,提高了模型的收敛速度。标签分配策略SimOTA快速计算、训练时间短,并避免了额外的优化参数,同时在大多数数据集下几乎没有影响精度。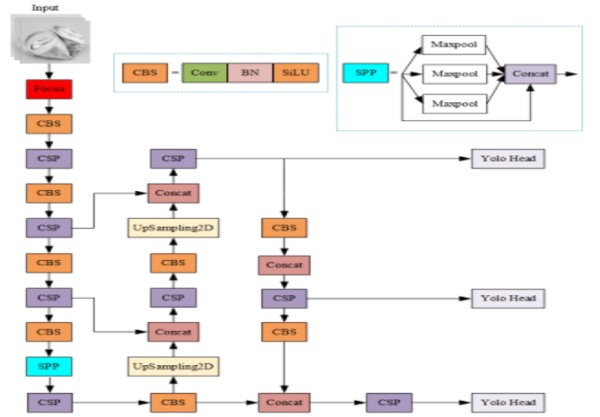
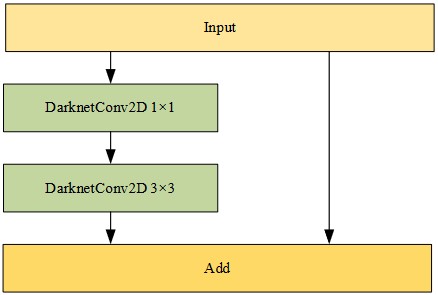
主干特征提取网络采用了CSPDarknet。该网络使用了残差网络(Residual Network),其中残差卷积主干模块由1×1卷积和3×3卷积构成。在残差部分,不对输入进行处理,直接与主干部分的输出结果相结合。这种设计使得网络更容易进行优化,并且可以通过增加网络深度的方式提高网络的准确率。使用残差块有助于解决深度神经网络中的梯度消失问题。
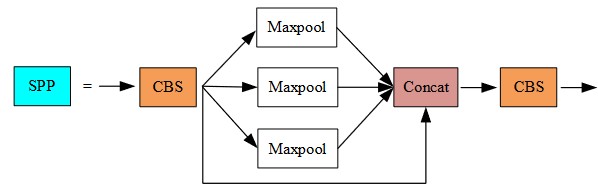
YOLOX使用了CSPNet网络结构和Focus网络结构作为主干特征提取部分。CSPNet网络结构将堆叠的残差块进行拆分,其中一部分继续堆叠残差块,另一部分直接连接输出,从而实现了残差块的效果。而Focus网络结构则在图像中每隔一个像素点提取一个值,并将这些独立的特征层堆叠起来,将图像的宽高信息转化为通道信息。主干网络还使用了SiLU激活函数,它结合了Sigmoid函数和ReLU函数的优点,具有平滑非单调且有下界无上界的特性,在深层神经网络中效果更优。此外,主干网络还引入了SPP结构(特征金字塔池化),通过池化核提取输入特征层的特征,将不同大小的特征图转化为固定大小的特征向量,以提高网络的感受野。
在特征提取过程之后,YOLOX使用主干网络的中间层、中下层和底层进行目标检测,并采用了FPN的结构进行特征融合。当输入图像尺寸为(640,640,3)时,中间层输出的尺寸为(80,80,256),中下层输出的尺寸为(40,40,512),底层输出的尺寸为(20,20,1024)。FPN从上到下采用上采样的方式传递和融合特征信息,得到用于目标预测的特征图。

三、检测的实现
3.1 数据集由于现有的公开数据集难以满足本研究的需要,我们决定通过相机拍摄和网络爬取两种方式收集大量的生活垃圾图片,并制作了一个全新的、专门针对生活垃圾智能分类的数据集。这个数据集包含了各种生活场景下的垃圾图片,包括可回收物、厨余垃圾、有害垃圾等。通过这种自制的数据集,我们能够更准确、更有效地训练模型,提高系统的分类准确性。

为了进一步提高模型的泛化能力和鲁棒性,我们对收集到的数据集进行了扩充。扩充方法包括旋转、翻转、缩放、裁剪等,以增加数据的多样性和模型的适应性。通过对数据集进行细致的预处理和扩充,我们的系统在实际应用中表现出了良好的分类效果和稳定性。

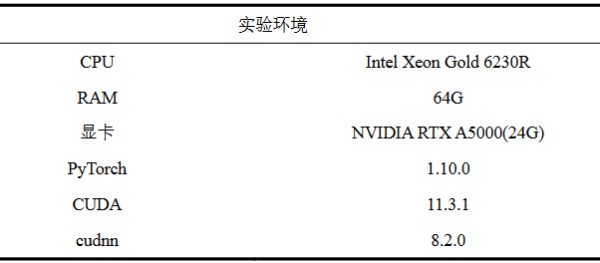
为了实现YOLOX算法,选择使用更常用的PyTorch框架进行模型的训练和测试,而不是最初在Joseph Redmon提出的Darknet框架下实现。考虑到数据集较大、训练时间较长等因素,本实验的模型训练是基于GPU硬件完成的。
垃圾检测模型训练实验中,通过比较精度AP、平均精度mAP、FPS等指标来评估模型的效果,最终选择检测速度与精度较为均衡的模型作为后续提升优化和部署的基础。预训练模型是在大型基准数据集上训练得到的模型,用于解决类似的问题。在目标检测任务中,首先利用主干网络进行特征提取,使用预训练模型来初始化主干网络的参数,可以避免权重参数的随机初始化,从而提取更有用的特征。
网络训练过程中,需要进行参数设置。本节所训练的模型输入图像大小均为640x640x3。训练过程分为冻结训练和解冻训练两部分。冻结训练阶段主要是为了提高训练效率,冻结主干网络部分并保持权重参数不被破坏。冻结训练阶段的学习率为0.001,批量大小为16,训练50个epoch。解冻训练阶段会根据数据特点调整参数,以提高模型在对应数据集上的精度。解冻训练阶段的学习率为0.0001,批量大小为16,训练50个epoch。
相关代码示例:
import torch
from torchvision.models.detection import fasterrcnn_resnet50_fpn
from torchvision.models.detection import coco_eval
from torchvision.models.detection import coco_utils
from torchvision.transforms import functional as F
from PIL import Image
# 加载预训练模型
model = fasterrcnn_resnet50_fpn(pretrained=True)
model.eval()
# 加载测试数据集
dataset = YourDataset() # 替换为你自己的数据集类
data_loader = torch.utils.data.DataLoader(dataset, batch_size=1)
# 初始化指标计算器
coco = coco_utils.get_coco_api_from_dataset(dataset)
coco_evaluator = coco_eval.CocoEvaluator(coco, iou_types=["bbox"])
# 开始测试
for images, targets in data_loader:
images = list(F.to_tensor(image) for image in images)
outputs = model(images)
outputs = [{k: v.to(torch.device("cpu")) for k, v in t.items()} for t in outputs]
# 将预测结果传递给评估器
res = {target["image_id"].item(): output for target, output in zip(targets, outputs)}
coco_evaluator.update(res)
# 计算指标
coco_evaluator.synchronize_between_processes()
coco_evaluator.accumulate()
coco_evaluator.summarize()
# 输出结果
print(f"Average Precision (AP): {coco_evaluator.stats[0]}")
print(f"Mean Average Precision (mAP): {coco_evaluator.stats[1]}")
print(f"Frames Per Second (FPS): {fps}")
实现效果图样例:




创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!
最后
网址:毕业设计:基于机器学习的生活垃圾智能分类系统 https://www.yuejiaxmz.com/news/view/241749
相关内容
毕设分享 单片机智能垃圾桶设计基于STM32的智能垃圾筒设计与实现
【计算机毕业设计】198智能家居系统
Springboot生活垃圾分类回收系统设计与实现
智能垃圾分选系统:让城市生活垃圾分类变得轻松有趣
智能垃圾分类设施 改变生活习惯
生活垃圾分类中转站数字化智能系统(服务)建设方案.docx
STM32毕业设计——基于STM32+MQTT+WiFi技术的智能家居系统设计与实现(毕业论文+程序源码)——智能家居系统
基于深度学习的生活垃圾检测与分类系统(网页版+YOLOv8/v7/v6/v5代码+训练数据集)
【32项目】基于stm32f103c8t6的智能垃圾桶设计(含完整代码)
随便看看
最新动态分享
- 正确洗手步骤3步法|手部清洁指南|儿童洗手教学|高效清洁(附图解教程)
- 什么是再生资源?再生资源产业的发展前景和挑战是什么?
- 装修后如何高效打扫?10步深度清洁指南+避坑攻略(附工具清单)
- 科学防脱指南:天然疗法+饮食调理+生活习惯=高效生发方案
- 一日一课(不经意间的家居生活整理魔法)(韩)崔丁化
- 整理不知从何做起?整理师教你用 5 步还原居家整洁!
- 生活垃圾可发电 实现资源再利用
- 范丞丞“呕吐”文案上热搜,时尚穿搭引人注目!
- 家庭大扫除高效清洁指南:10个懒人妙招,3小时搞定全屋死角
- 一鸣惊人!秀才搞卫生的5个高效清洁技巧家居清洁收纳整理生活小妙招成语冷知识
热点动态分享
- 133073
- 36101
- 35592
- 23609
- 22957
- 21255
- 20572
- 14777
- 14695
- 14647

