一种矩形截面通风管道清洁机器人的设计
使用管道疏通器:这是一种专门设计的工具,适用于疏通各种类型的下水道堵塞。 #生活知识# #家庭维修常识# #马桶堵塞清洁#
一种矩形截面通风管道清洁机器人的设计一种矩形截面通风管道清洁机器人的设计
苏冠明,钱瑞明
(东南大学机械工程学院,江苏 南京 211189)
摘要:基于中央空调矩形截面通风管道清洁需求,提出了一款自适应管道高度和宽度的清洁机器人设计方案。通过对机器人过管道直角弯和圆角弯时的情况进行分析,确定了机器人长、宽的数据;设计了节省空间的轮式行走结构、具有适应调节能力的清洁机构、高效的灰尘收集机构,3个机构同时进行作业,确保了管道的清理效果。
关键词:通风管道;清洁机器人;结构设计
随着社会的发展,越来越多的楼宇、别墅等采用中央空调,然而由于没有及时清洗风管所造成的空气污染却在危害着人们的身体健康。长期得不到清洁的风管为有害细菌提供了适宜的生存环境,它们会不断地滋生并随着四通八达的风管广泛传播,在室内造成空气的二次污染。建筑物空调通风系统所造成的人体健康危害和疾病可达几十种[1],只有做到定期的清洁(最少保证一年清洁两次),才可以使办公、生活环境得到保证[2]。而目前大部分楼宇的中央空调都是在管道问题较严重时才着手解决,真正做到每年定期清洗的很少。由于国外的空调普及较早,因此关于管道清洁机器人的研究也较国内领先。瑞典的 WintClean 机器人使用的行走部件为履带式,这种行走方式具有跨越障碍能力强、转弯半径小等优点,缺点是行走速度慢,结构复杂;其清洁单元使用喷气式清尘法,利用压缩空气的冲力,将管道中的灰尘吹起、收集并最终清理到管道外部。加拿大的AIRTOX清扫机器人、韩国的Hanlin风管清扫机器人以及英国的Indoor清扫机器人都是采用类似的行走和清洁方式[3]。
在国内,虽然专门针对建筑工程通风管道内部的移动清污机器人的研究起步较晚,但近年来也越来越多地应用机器人来清洁管道,包括利用机器人检查、机器人清洁、机器人收集和机器人消毒等[4]。尽管清洁机器人的应用越来越普遍,但其在功能稳定性和环境适应性上还有很大的发展空间,比如清洁方式比较单一、清洁机器人成本较高且笨重等问题都急需改善。
本文在综合诸多矩形管道清洁机器人及其清洁系统优缺点的基础上,研究设计了一种清洁机器人,该机器人可以在管道内灵活移动并能适应不同尺寸的管道,在清洁过程中可以同时清理管道的所有内壁。
1 矩形通风管道清洁机器人整体方案
矩形管道内部路线为直道和转弯道,为使清洁机器人在管道内行走更加灵活,本文设计的清洁机器人以轮式机构作为其行走驱动方式,如图1所示,与腿式和履带式移动方式相比,轮式结构简单紧凑,抵抗冲击的各向同性能力强[5]。机器人共有两个驱动电机,分别带动两个前轮配合机器人尾部的万向轮实现机器人的行走运动。在清洁机器人运动过程中,底部盘刷3转动,顶部条刷机构1和侧面条刷机构4(共两组,在机器人的两侧,并与用于位置调整的电推杆连接)以一定压力贴合管道内壁,这样在行进过程中就可以对管道所有内壁进行同时清理。当机器人行走至管道尺寸发生变化的路段时,机器人可以通过适当调节上下高度和左右宽度的尺寸来适应不同的管道环境。在上述清洁动作进行的同时,收集储存机构5借助风机和滚刷将清洁下来的灰尘吸附起来,放入灰尘收集箱内。
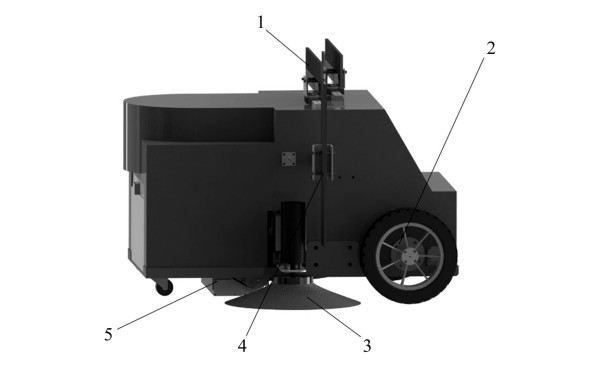
1—顶部条刷机构;2—轮式行走机构;3—盘刷机构; 4—侧面条刷机构;5—灰尘收集机构
图1 矩形截面通风管道清洁机器人整体机构
2 清洁机器人基本清洁功能的设计
清洁机器人在空调管道内的行走环境不算复杂,主要是直线路段和直角或圆角弯道。如图2(a)所示,机器人进入管道,盘刷和条刷处于初始位置,当清洁工作开始时,如图2(b)所示,盘刷和条刷都会到达适合管道内部尺寸的位置,在机器人行进过程中,对壁面进行灰尘清理。图2(c)是过弯道时机器人的姿态。
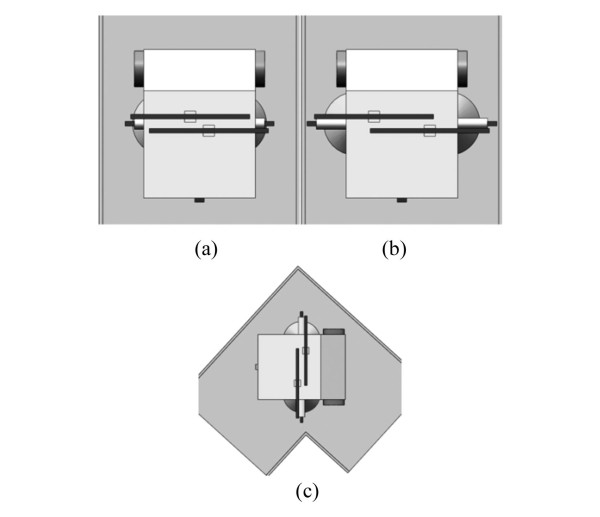
图2 机器人管道内清洁过程简图
为使机器人能完成基本的清洁工作,应使条刷和盘刷具有对管道尺寸变化的适应能力,以保清洁过程中尤其是在转弯时尽可能减少清洁死角。
3 清洁机器人的通过能力的设计
清洁机器人的尺寸决定了其在管道内的通过能力,而在空调的矩形管道内最为关键的是过弯道的能力。国内风管行业在制造风管时其尺寸是严格按照行业标准执行的,常用宽度尺寸有400mm、500mm、600mm、800mm和1 000mm[5](管道的高度没有统一的规格,但是一般要大于宽度的1/4)。
本文设计的清扫机器人主要是适应宽度为500mm和600mm的管道,所以分析计算时选取管道宽度W=500mm,高度H=300mm。假设清洁机器人的车身长度为L,宽度为S。
3.1 机器人过直角弯的情况分析
机器人在空调管道内过直角弯时,以管道外壁建立X-Y坐标轴,并假设转弯时,机器人外侧与管道完全接触,如图3所示。
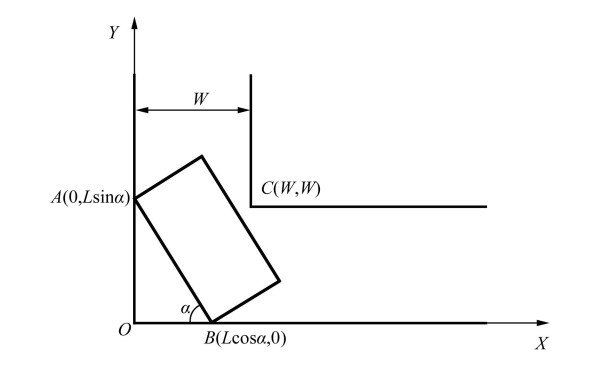
图3 机器人过直角弯坐标简图
若使机器人能够顺利通过直角弯,则要满足C到AB的距离始终大于机身宽度。
AB直线公式为:
y=-tanα+Lsinα
(1)
式中:α为机器人左侧边与管道的x轴之间的夹角。
C到直线AB的距离为:
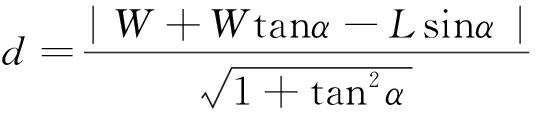
(2)
所以机器人的长度与宽度应满足如下关系:
(3)
若dmin≥Smax,则机器人可以顺利通过管道直角弯道处。当α=45°时,d最小。将α=45°代入式(3)化简可得:
(4)
将管道宽度W=500mm代入式(4)中可得:
2S+L≤1 414
(5)
3.2 机器人过圆弧弯的情况分析
如图4所示,在机器人过圆弧弯时应满足管道内侧圆弧的半径小于圆心到机器人内侧的距离,即满足:
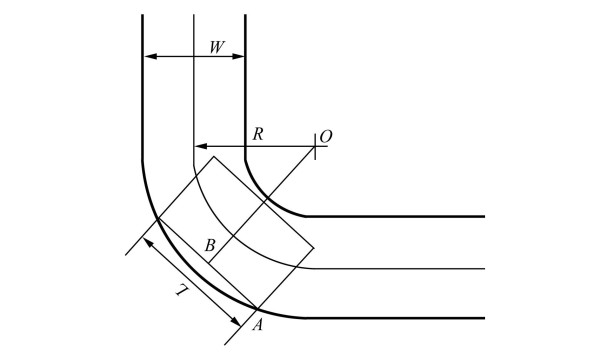
图4 机器人过圆弧弯
(6)

(7)
式中:R为圆角弯圆心到管道中心线的距离。
将式(6)代入式(7)并化简可得:

(8)
将R=W=500mm代入式(8)得:

(9)
综合式(5)和式(9),确定本文所设计的机器人的尺寸为L=460mm,S=360mm。该尺寸机器人完全可以满足管道宽度W=500mm以上的空调管道的通过性要求。
4 清洁机器人部分机构设计
4.1 移动机构设计
为实现机器人在管道内的灵活移动,并在清洗过程中没有过多的灰尘扬起而影响空气质量,机器人的移动速度不宜过快,因此采用轮式移动。轮式移动具有转向方便、稳定性强、形式多样的特点,同时较履带式成本更低,质量更轻,更加灵活[6-7]。轮式驱动部分的设计改为电机错位布置,同时主动轮保持同轴,这样可以有效地节省电机的摆放空间,如图5所示。
4.2 清洁机构设计
以往较多的产品或者专利对矩形管道内壁的4个壁面是分别清洁的,本文设计的机器人则是对矩形管道的4个壁面同时清洁。为使机器人自适应矩形管道的尺寸,包括高度和宽度,本文采用了5个电动推杆进行合理布置来实现4个方向的尺寸变化。如图6所示,左侧条刷组1和右侧条刷组3均是由两个错位放置的条刷组成,相互补偿以保证侧壁的清洁效果更好。上电推杆组2和下电推杆组5用于水平方向对条刷的位置调整,以更好地与壁面接触。为了使机器人更好地适应管道的高度,在竖直方向选用一竖直电推杆4与上电推杆组2结合,实现对顶部条刷高度的调整以适应不同高度的管道。

1—电机;2—减速箱;3—主动轮
图5 机器人轮式驱动部分
1—左侧条刷组;2—上电推杆组;3—右侧条刷组; 4—竖直导向推杆;5—下电推杆组
图6 升降调整结构布置图
此外底部盘刷也需要像侧面条刷一样,可以调整两个盘刷间的距离。本文采用如图7所示的调整机构,旋钮3(旋钮与机架相连接)的旋转驱动丝杆1转动,使螺母2上下产生位移,再通过连杆4驱动固定在滑块上的盘刷机构(电机5驱动的盘刷6一起固定在支架上,支架固定在滑块上),实现盘刷的左右移动(导轨固定在机器人机架上),最终实现两个盘刷中心距的调整。
1—丝杆;2—螺母;3—旋转按钮;4—连杆;5—电机; 6—盘刷;7—滑块;8—导轨
图7 盘刷位置调整机构简图
因为顶部灰尘的沉积量相对其他壁面是最少的,所以顶部条刷的布置类似于侧面条刷机构共两个,并且错位布置在导轨上,顶部条刷以一定的柔性结构与侧面条刷连接,使其可随侧面条刷位置的变化而变化。
4.3 滚刷灰尘收集机构设计
为了使机器人清扫灰尘和收集灰尘同步进行,在机器人后设置了灰尘收集机构。底面盘刷中间部分的空隙,采用图8所示的滚刷5来进行补偿。电机1带动叶轮2转动,将灰尘吸入灰尘收集箱4内,过滤网3由多层过滤棉组成,可以有效避免较大的灰尘进入叶轮。
1—电机;2—叶轮;3—过滤网;4—灰尘收集箱;5—滚刷电机
图8 灰尘收集机构原理简图
5 结束语
不同于其他的中央空调管道清洁机器人壁面清洁和灰尘收集难以同时进行,本文设计的机器人能够高度适应管道截面尺寸,实现管道内壁4个壁面同时清洁并及时收集灰尘。本文已经初步完成了虚拟样机的设计,但是结构稳定性和作业能力的提高有待在加工实物后进行改善。就目前空调管道清洁的市场需求而言,该机器人具有很大的潜在价值和商业前景。
参考文献:
[1] 刘莹, 申超, 邵泉钢,等. 中央空调管道式通风系统清洁机器人[J]. 机械科学与技术,2011,30(3):435-439.
[2] 李恒武. 一种自适应型空调管道清洗机器人的结构研制与运动分析[D]. 武汉:武汉理工大学,2011.
[3] 王娅. 两种典型移动机器人的设计分析[D].济南:山东大学,2008.
[4] 王娅,任升峰,徐明刚,等. 中央空调管道清洁机器人系统的设计[J]. 机械设计与研究,2005(6):47-49.
[5] 黑沫,尚建忠,罗自荣,等. 中央空调风道清洁机器人设计[J]. 机械设计,2010(11):19-24.
[6] HOFNER C, SCHMIDT G. Path planning and guidance techniques for an autonomous mobile cleaning robot[J]. Robotics & Autonomous Systems, 1995, 14(2/3):199-212.
[7] ZIEGLER A, GILBERT D, MORSE C J, et al. Autonomous surface cleaning robot for wet and dry cleaning: US, US8387193[P]. 2013.
Design of a cleaning robot for ventilation ducts with rectangular cross section
SU Guanming, QIAN Ruiming
(School of Mechanical Engineering, Southeast University, Jiangsu Nanjing, 211189, China)
Abstract:To meet the needs of cleaning dust operation of the central air conditioning ventilation duct, it develops a cleaning robot adapted to the height and width of pipe, shows the detail about the functions of walking, cleaning, collection and adjustment. Through the calculation of the robot at right angles and rounded corners, it ensures the capacity of the robot. It designs a space-saving wheeled walking structure with the ability to adjust the cleaning mechanism, introduces the efficient dust collection agencies. The three structures operate at the same time, the cleaning effect is obvious.
Key words:ventilation ducts; cleaning robot; structure design
DOI:10.3969/j.issn.2095-509X.2017.03.012
收稿日期:2016-07-13
作者简介:苏冠明(1991—),男,河南汝州人,东南大学硕士研究生,主要研究方向为机器人学。
中图分类号:TH122
文献标识码:A
文章编号:2095-509X(2017)03-0061-04
网址:一种矩形截面通风管道清洁机器人的设计 https://www.yuejiaxmz.com/news/view/296315
相关内容
管道清理机器人设计一种多功能地面清洁机器人的机械结构设计(开题报告)
机械通风系统
地面清洁机器人推荐「南京特沃斯清洁设备供应」
中央空调管道清洁机器人2.doc
【潍坊市15×25不锈钢矩形管=型号齐全】价格
密闭空间:清洁技术和基于机器人的表面清洁
弧形玻璃清洁机器人
卡通下水道清洁器 扫地机器人 PBR清洁器 泡泡机 智能机器
商用清洁机器人介绍
随便看看
最新动态分享
- 床头怎么装饰好看,床头装饰搭配技巧
- 床头适合挂什么装饰画
- 卧室床头挂什么好
- 床头怎么装饰好看
- 20平米卧室装修 10款创意床头板点靓小空间
- 10个惊艳床头设计 启动卧室个性模式
- 卧室床头怎么装饰 打造舒适床头
- 卧室床头背景怎么做才好看?推荐五种高级感的做法
- 卧室床头可以摆放哪些物件
- 10款床头装饰 增色你的美梦
热点动态分享
- 2743
- 2638
- 2307
- 2268
- 2152
- 1785
- 1641
- 1490
- 1344
- 1302

