视觉障碍人员的智能导航助手
无障碍设计还需考虑视力障碍者的视觉辅助设施 #生活技巧# #家居装修建议# #无障碍设计#
1.本专利涉及视觉障碍人员的智能导航助手,属于智能设备技术领域。
背景技术:
2.视觉障碍是指由于先天或后天原因,导致视觉器官(眼球视觉神经、大脑视觉中心)之构造或机能发生部分或全部之障碍,经治疗仍对外界事物无法(或甚难)作视觉辨识。因此视觉障碍人员难以走出自己熟悉的生活空间,给生活带来巨大的不便,也降低了生活质量。视觉障碍人员出行最大的障碍有两个:第一个是无法辨识方向,难以从出发点到达目的地;第二个是无法辨识行走路径上的障碍物,容易跌倒或者撞上障碍物。
3.随着科学技术的发展,传感器检测技术、全球定位技术、计算机处理能力都得到跨越式的发展,目前多种技术的融合已经实现了汽车的自动驾驶,实现汽车的自动控制以及车辆的路径规划,障碍物检测以及避障等。因此,现有技术条件有能力为视觉障碍人员解决上述的出行难题。
技术实现要素:
4.针对上述问题,本专利为了满足视觉障碍人员外出的意愿,提供一种视觉障碍人员的智能导航助手,采用智能手机辅助导航、基于激光雷达的障碍物检测以及智能算法避障、丰富的人机交互,为视觉障碍人员出行提供安全保障。
5.本专利解决其技术问题所采用的技术方案是:
6.视觉障碍人员的智能导航助手,包括佩戴在用户头上的头盔,所述的头盔前方设置激光雷达,所述的激光雷达的检测方向设置为前下方,所述的头盔两侧设置语音播报的喇叭,所述的头盔侧面设置充电接口和开关按键,所述的头盔内部设置控制器,所述的控制器包括进行集中控制的处理器,与所述的处理器连接的蓝牙模块、激光雷达、加速度角度传感器和由扁平电机组成的振动器,所述的蓝牙模块用于实现与用户的智能手机连接,在所述的头盔上建立头盔坐标系(x,y,z),x轴指向前方,y轴指向右侧,z轴指向上方,所述的激光雷达用于检测前方地面的状况,建立传感器坐标系(x,y,z),x和z轴分别与x轴和z轴成β夹角,y轴与y轴方向相同,所述的传感器坐标系(x,y,z)与头盔坐标系(x,y,z)之间的偏移量为[x0,y0,z0],所述的激光雷达输出数据f
k
(i,j)={(d
kij
,α
i
,j
·
θ)},其中k=0,1,2...,为检测的序号,α
i
为所述的激光雷达在竖直方向上的检测角度,i为竖直方向上的数据序号,i=0,1,2...n
‑
1,n为所述的激光雷达的线数,j为水平方向上的数据序号,j=0,1,2...,θ为所述的激光雷达在水平方向上的检测角度增量,所述的加速度角度传感器用于测量所述的激光雷达的方向角度和加速度值,坐标系与所述的传感器坐标系重合,输出x轴,y轴和z轴方向上的角度值ω
xk
、ω
yk
和ω
zk
和加速度值a
xk
、a
yk
和a
zk
,还包括与所述的充电接口连接的充电电路,所述的充电电路输出连接充电电池,所述的充电电池输出连接电源电路,所述的电源电路输出所述的控制器及其他模块所需的电源,所述的开关按键和喇叭与所述的处理器连接,所述的处理器用于实现智能导航方法,所述的智能导航方法包括以下步骤:
[0007]
(1)用户通过所述的开关按键启动所述的智能导航助手,所述的处理器控制所述的喇叭输出“开机”提示音,所述的处理器通过所述的蓝牙模块连接用户的智能手机;
[0008]
(2)用户启动导航软件,输入目的地,开始导航,所述的导航软件的提示语音通过所述的蓝牙模块发送至所述的处理器,并通过所述的喇叭进行播报;
[0009]
(3)每隔固定周期δt,所述的处理器读取所述的加速度角度传感器输出三个方向上的角度值ω
xk
、ω
yk
和ω
zk
和加速度值a
xk
、a
yk
和a
zk
,读取所述的激光雷达输出数据f
k
(i,j)={(d
kij
,α
i
,j
·
θ)},转换为传感器坐标系下的点[x
ijk
,y
ijk
,z
ijk
]
‑1=[d
ijk
·
cosα
i
·
sin(j
·
θ
‑
θ0),d
ijk
·
cosα
i
·
cos(j
·
θ
‑
θ0),d
ijk
·
sinα
i
],其中θ0为j=0的检测角度;计算所述的激光雷达的速度
[0010]
,[v
x0
,v
y0
,v
z0
]
‑1=[0,0,0]
‑1;计算所述的激光雷达的偏移量[δx
k
,δy
k
,δz
k
]
‑1=[δx
k
‑1,δy
k
‑1,δz
k
‑1]
‑1+[v
xk
‑1,v
yk
‑1,v
zk
‑1]
‑1·
δt,[δx0,δy0,δz0]
‑1=[x0,y0,z0]
‑1;
[0011]
采用坐标转换方法,将点[x
ijk
,y
ijk
,z
ijk
]
‑1转换为头盔坐标系下的点
[0012][0013]
(4)在点[x
ijk
,y
ijk
,z
ijk
]
‑1组成的集合中,采用障碍物识别算法,搜索障碍物,并提取障碍物信息:距离d,方位δ,高度h,宽度w;如果发现障碍物,所述的处理器通过所述的振动器警示用户,并且通过所述的喇叭播报障碍物信息;
[0014]
(5)当用户到达目的地,用户通过所述的开关按键关闭所述的智能导航助手,所述的处理器控制所述的喇叭输出“关机”提示音;用户通过所述的充电接口给所述的充电电池充电,为下次使用做准备。
[0015]
步骤(4)中的障碍物识别算法包括以下步骤:
[0016]
(4a)、初始化:所述的处理器通过所述的喇叭提示用户在平整区域行走,所述的处理器存储步骤(3)输出的点[x
ijm
,y
ijm
,z
ijm
]
‑1,其中m=0,1,2,3.....m
‑
1,
‑
0.25米<y
ijm
<0.25米,取z
ijm
的均值为身高数据,
[0017][0018]
(4b)、运行状态:
[0019]
当sh+z
ijk
<
‑
t
l
,将点[x
ijk
,y
ijk
,z
ijk
]
‑1存入数据链表l0,其中t
l
为凹陷区域高度阈值;当sh+z
ijk
>t
h
,将点[x
ijk
,y
ijk
,z
ijk
]
‑1存入数据链表l1,t
h
为凸起障碍物高度阈值;
[0020]
遍历完所有的点以后,如果数据链表l0非空,则计算凹陷区域参数:距离d=minx(l0),方位δ=arctan(avergey(l0)/avergex(l0)),高度h=sh+avergez(l0),宽度w=maxy(l0)
‑
miny(l0),其中minx和miny分别为计算数据链表中的x坐标和y坐标最小值的算式,
maxy为计算数据链表中点的y坐标最大值的算式,avergex和avergey为计算数据链表中的x坐标和y坐标均值的算式;
[0021]
如果数据链表l1非空,则计算凸起障碍物参数:距离d=minx(l1),方位δ=arctan(avergey(l1)/avergex(l1)),高度h=h=sh+avergez(l1),宽度w=maxy(l1)
‑
miny(l1)。
[0022]
本专利的有益效果主要表现在:1、可提供从出发点至目的地的导航,可进行远距离外出;2、语音及振动提示,人机交互丰富;3、激光雷达进行障碍物检测,并结合智能算法,可判断凸起障碍物以及凹陷的区域,保障视觉障碍人员出行安全。
附图说明
[0023]
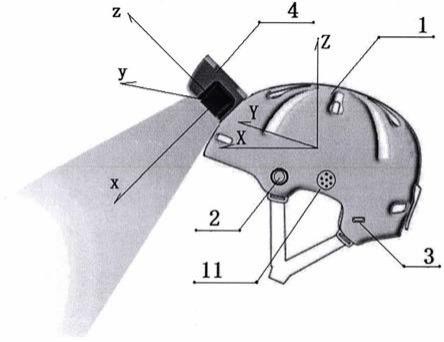
图1是本发明的外形和坐标系示意图;
[0024]
图2是本发明的控制原理框图。
具体实施方式
[0025]
下面结合附图对本发明作进一步描述:
[0026]
参照图1
‑
2,为了实现视觉障碍人员的出行愿望,提供一种视觉障碍人员的智能导航助手,包括佩戴在用户头上的头盔1,所述的头盔1一方面可以在意外情况下保护用户头部,另一方面也可以安装电子设备。
[0027]
为了检测行进方向上的凸起障碍物以及凹陷区域,所述的头盔1前方设置激光雷达4,所述的激光雷达4的检测方向设置为前下方。所述的头盔1两侧设置语音播报的喇叭11,可以进行语音播报,进行路线提示以及危险警示。所述的头盔1侧面设置充电接口3和开关按键2。所述的充电接口3可以连接外部充电用的电源,所述的开关按键2用于启动或者关闭所述的智能导航助手。
[0028]
为了实现智能控制,所述的头盔1内部设置控制器,所述的控制器包括进行集中控制的处理器8,与所述的处理器8连接的蓝牙模块9、激光雷达4、加速度角度传感器10和由扁平电机组成的振动器12。所述的开关按键2和喇叭11与所述的处理器8连接。
[0029]
所述的蓝牙模块9用于实现与用户的智能手机13连接,接收所述的智能手机13的语音信息;所述的加速度角度传感器10用于测量所述的头盔1的旋转角度和移动位移,优选的,设置为invensense的mpu
‑
6050模块,可提供三轴加速度和三轴角度数据;所述的振动器12用于紧急情况下通过振动提示用户有碰撞或者跌倒的危险。
[0030]
还包括与所述的充电接口3连接的充电电路5,所述的充电电路5输出连接充电电池6,所述的充电电池6输出连接电源电路7,所述的电源电路7输出所述的控制器及其他模块所需的电源。
[0031]
为了进行数据计算,在所述的头盔1上建立头盔坐标系(x,y,z),x轴指向前方,y轴指向右侧,z轴指向上方,在所述的激光雷达4上建立传感器坐标系(x,y,z),x和z轴分别与x轴和z轴成β夹角,y轴与y轴方向相同,传感器坐标系(x,y,z)与头盔坐标系(x,y,z)之间的偏移量为[x0,y0,z0]。
[0032]
所述的激光雷达4输出数据f
k
(i,j)={(d
kij
,α
i
,j
·
θ)},其中k=0,1,2...,为检测的序号,α
i
为所述的激光雷达4在竖直方向上的检测角度,i为竖直方向上的数据序号,i=0,1,2...n
‑
1,n为所述的激光雷达4的线数,j为水平方向上的数据序号,j=0,1,2...,θ为
所述的激光雷达4在水平方向上的检测角度增量。优选的,所述的激光雷达4设置为3维激光雷达,可检测更大区域,具体为velodyne vlp16激光雷达,n为16,α0至α
15
依次
‑
15
°
,1
°
,
‑
13
°
,3
°
,
‑
11
°
,5
°
,
‑9°
,7
°
,
‑7°
,9
°
,
‑5°
,11
°
,
‑3°
,13
°
,
‑1°
,15
°
,θ=0.1
°
,由于vlp16水平方向上检测范围是360
°
,j的取值范围只取120
°
,即j=0,1,2...1200。
[0033]
所述的加速度角度传感器10用于测量所述的激光雷达4的方向角度和加速度值,自身坐标系与所述的传感器坐标系重合,输出x轴,y轴和z轴方向上的角度值ω
xk
、ω
yk
和ω
zk
和加速度值a
xk
、a
yk
和a
zk
。
[0034]
所述的处理器8用于实现智能导航方法,所述的智能导航方法包括以下步骤:
[0035]
(1)用户通过所述的开关按键2启动所述的智能导航助手,所述的处理器8控制所述的喇叭11输出“开机”提示音,所述的处理器8通过所述的蓝牙模块9连接用户的智能手机13;
[0036]
(2)用户启动导航软件,输入目的地,开始导航,所述的导航软件的提示语音通过所述的蓝牙模块9发送至所述的处理器8,并通过所述的喇叭11进行播报;
[0037]
所述的智能手机13上的导航软件负责从出发地至目的地之间的路径规划与导航,让用户可以出行至距离较远或者不熟悉的地方。
[0038]
(3)每隔固定周期δt,所述的处理器8读取所述的加速度角度传感器10输出三个方向上的角度值ω
xk
、ω
yk
和ω
zk
和加速度值a
xk
、a
yk
和a
zk
,读取所述的激光雷达4输出数据f
k
(i,j)={(d
kij
,α
i
,j
·
θ)},然后将距离分量d
kij
,向传感器坐标系xyz轴进行投影,从而将数据f
k
(i,j)转换为传感器坐标系下的点[x
ijk
,y
ijk
,z
ijk
]
‑1==[d
ijk
·
cosα
i
·
sin(j
·
θ
‑
θ0),d
ijk
·
cosα
i
·
cos(j
·
θ
‑
θ0),d
ijk
·
sinα
i
],其中θ0为j=0的检测角度;
[0039]
由于用户在使用过程中,头部会带动所述的激光雷达4发生运动,为了精准确定所述的激光雷达4的检测数据相对所述的头盔坐标系的准确位置,需要计算所述的激光雷达4的移动偏量。首先,计算所述的激光雷达4的速度
[0040]
,[v
x0
,v
y0
,v
z0
]
‑
1=[0,0,0]
‑1;其中,[a
xk
·
δt,a
yk
·
δt,a
zk
·
δt]
‑1为当前检测周期内,所述的激光雷达4的速度变化值,经过坐标旋转以后与[v
xk
‑1,v
yk
‑1,v
zk
‑1]
‑1求和得到当前速度。
[0041]
然后,计算所述的激光雷达4的偏移量[δx
k
,δy
k
,δz
k
]
‑1=[δx
k
‑1,δy
k
‑1,δz
k
‑1]
‑1+[v
xk
‑1,v
yk
‑1,v
zk
‑1]
‑1·
δt,[δx0,δy0,δz0]
‑1=[x0,y0,z0]
‑1;其中,[v
xk
‑1,v
yk
‑1,v
zk
‑1]
‑1·
δt是当前检测周期内,所述的激光雷达4的在xyz轴方向上的偏移量。
[0042]
最后,采用坐标转换方法,将点[x
ijk
y
ijk
z
ijk
]
‑1转换为头盔1坐标系下的点
[0043][0044]
坐标[x
ijk
,y
ijk
,z
ijk
]
‑1先绕x轴旋转ω
xk
,再绕y轴旋转
‑
β+ω
yk
,最后加上偏移量[x0,y0,δz
k
]
‑1得到头盔坐标系下的坐标[x
ijk
,y
ijk
,z
ijk
]
‑1,以[x0,y0]作为x、y轴方向上的偏移量,可以消除了所述的激光雷达4在x、y轴方向上的偏移量累计,并且没有进行绕z轴旋转,得到用户视角下的坐标值。
[0045]
(4)在点[x
ijk
,y
ijk
,z
ijk
]
‑1组成的集合中,采用障碍物识别算法,搜索障碍物,并提取障碍物信息:距离d,方位δ,高度h,宽度w;如果发现障碍物,所述的处理器8通过所述的振动器12警示用户,并且通过所述的喇叭11播报障碍物信息;
[0046]
(5)当用户到达目的地,用户通过所述的开关按键2关闭所述的智能导航助手,所述的处理器8控制所述的喇叭11输出“关机”提示音;用户通过所述的充电接口3给所述的充电电池6充电,为下次使用做准备。
[0047]
步骤(4)中的障碍物识别算法包括以下步骤:
[0048]
(4a)、初始化:所述的处理器8通过所述的喇叭11提示用户在平整区域行走,所述的处理器8存储步骤(3)输出的点[x
ijm
,y
ijm
,z
ijm
]
‑1,其中m=0,1,2,3.....m
‑
1,
‑
0.25米<y
ijm
<0.25米,取z
ijm
的均值为身高数据,
[0049]
步骤(4a)用于所述的智能导航助手初始化,学习用户的身高,为判断障碍物提供数据基础。采用用户行走路线前方左右共计半米范围的高度测量数据作为身体的身高数据。
[0050]
(4b)、运行状态:
[0051]
当sh+z
ijk
<
‑
t
l
,将点[x
ijk
,y
ijk
,z
ijk
]
‑1存入数据链表l0,其中t
l
为凹陷区域高度阈值;当sh+z
ijk
>t
h
,将点[x
ijk
,y
ijk
,z
ijk
]
‑1存入数据链表l1,t
h
为凸起障碍物高度阈值;根据地面反射点的高度值进行障碍物判断,因为z
ijk
为负值,当sh+z
ijk
<
‑
t
l
,地面反射点位于地面以下,为凹陷位置;当sh+z
ijk
>t
h
,地面反射点高于地面,为凸起的障碍物。
[0052]
遍历完所有的点以后,如果数据链表l0非空,则计算凹陷区域参数:距离d=minx(l0),方位δ=arctan(avergey(l0)/avergex(l0)),高度h=sh+avergez(l0),宽度w=maxy(l0)
‑
miny(l0),其中minx和miny分别为计算数据链表中x坐标和y坐标最小值的算式,maxy为计算数据链表中的y坐标最大值的算式,avergex和avergey为计算数据链表中的x坐标和y坐标均值的算式;
[0053]
如果数据链表l1非空,则计算凸起障碍物参数:距离d=minx(l1),方位δ=arctan(avergey(l1)/avergex(l1)),高度h=sh+avergez(l1),宽度w=maxy(l1)
‑
miny(l1)。
网址:视觉障碍人员的智能导航助手 https://www.yuejiaxmz.com/news/view/341564
相关内容
盲人辅助设备赋能视障人士,实时导航与避障打造无障碍生活Meta 导盲机器人里颠覆性的人工智能:导航、生活、社交无障碍
视障导航功能在北京杭州上线,高科技让盲人出行更顺畅
【前沿科普】盲人的春天——视觉导航与虚拟陪伴系统
盲人出行挑战与曙光:“盲人视觉辅助技术研发”助力无障碍生活
“会说话”的家用电器,助视障人士居家生活“无障碍”
什么是自动导航助手
无障碍、便捷智慧生活服务体系构建技术与示范
激光雷达辅助导航:科技赋能,盲人独立出行新篇章
无障碍成为城市美丽的风景 ——无障碍环境建设法实施一周年纪实
随便看看
最新动态分享
- 餐具的管理方案.doc
- 酒店餐具存放标准,细节决定成败
- 一种餐盒自动售卖机及餐具储存仓制造技术
- 学校餐具消毒方案.docx
- 酒店存储餐具,细节决定成败
- 餐具使用场景建模方案,餐具使用场景建模方案模板
- 我把送的储藏间收拾干净了,把餐具先搬来, 真的买的时候爽,搬的时候想死
- 酒店餐具洗刷工作的重要性及方法
- 史淑荣医生:白血病患者的餐具需要单独存放吗?
- 医院食堂承包的食品安全保障措施
热点动态分享
- 2819
- 2691
- 2606
- 2349
- 2205
- 1835
- 1651
- 1499
- 1392
- 1312

