基于全向阵列的开放空间噪音污染控制方法及装置
遵循《噪声污染防治法》控制噪音污染 #生活常识# #环保生活Tips# #环保法规教育#
本发明属于噪声控制,特别涉及一种基于全向阵列的开放空间噪音污染控制方法及装置。
背景技术:
1、环境噪声污染无处不在。然而,如果人们长期工作生活在噪声污染的环境中,将会带来极大的健康风险,例如听力损失和噪声困扰。噪声控制的实现方法主要分为被动控制和主动控制。被动控制主要采用吸声、隔振或者通过物理布局改变声波传播路径等方法。噪声频率越高,波长越短,在空气中衰减越快。针对频率高的噪声,往往采用被动控制方法,这些方法对于降低空间中的中高频噪声具有很好的效果。但其设备体积庞大且现场布置复杂,对低频噪声消除效果较差而在应用中受到很大的制约。主动噪声控制由于其应用场景灵活,能有效弥补被动控制的不足,针对低频噪声具有良好的消除效果,在开放空间的噪声控制方面取得了广泛的应用。
2、控制器是主动噪声控制应用中的关键,而自适应算法是控制器的重要组成部分。一个具有快速收敛和良好稳定性的自适应算法对主动噪声控制系统是至关重要的。著名的滤波-x最小均方算法(fxlms)最早由burgress提出,由于fxlms算法简单有效,对硬件计算资源要求低且具有较好的降噪效果,至今仍是应用最为广泛的算法。为了进一步提高算法性能,提出一种改进而来的归一化滤波-x最小均方误差(nfxlms)算法,它考虑了滤波器输入端信号变化,并采用了一种特殊的步长参数,使得算法更加稳定而且收敛速度更快。
3、这些噪声控制方法已经在工业生产、住宅、建筑物和车辆等不同领域得到广泛应用。它们可以帮助人们创造一个更加安静、舒适的环境。然而目前针对目标空间的主动噪声控制存在目标区域固定,一旦目标移动超过范围,则降噪效果大大降低。由于无法判断目标位置,次级声源无法对目标进行锚定,目标不在次级声源覆盖范围内时,噪声控制也将失去效果,其应用场景也大大受限。因此,针对开放空间中的目标噪声控制技术,仍需要进一步的深入的研究。
技术实现思路
1、本发明的目的在于解决现有技术中在开放空间中针对移动人员目标进行主动噪声控制,会存在移动目标难以实时跟踪、空间上无法实现全向广域覆盖的问题,提出了一种基于全向阵列的开放空间噪音污染控制方法及装置,通过球形扬声器全向阵列使anc系统具有全空间覆盖能力,对开放空间中移动人员目标实现追踪、可视化管理和降噪的目的。
2、为了实现上述目的,本发明采用以下的技术方案:
3、本发明提供了一种基于全向阵列的开放空间噪音污染控制方法,包含以下步骤:
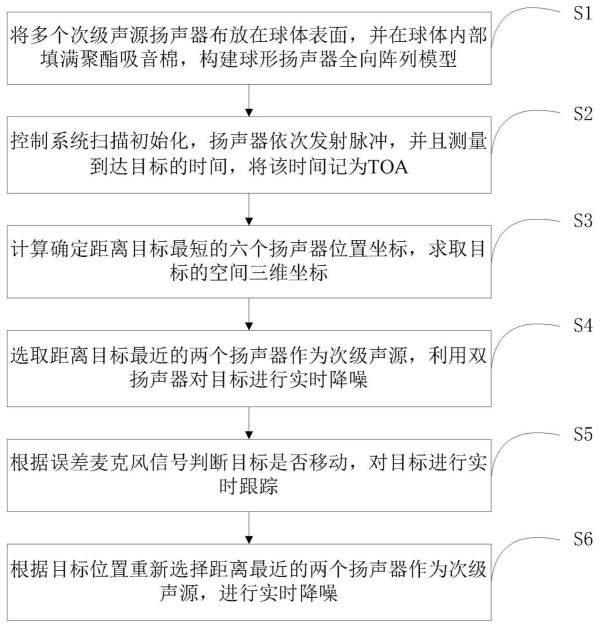
4、将多个次级声源扬声器布放在球体表面,并在球体内部填满聚酯吸音棉,构建球形扬声器全向阵列模型;
5、控制系统扫描初始化,扬声器依次发射脉冲,并且测量到达目标的时间,将该时间记为toa;
6、计算确定距离目标最短的六个扬声器位置坐标,求取目标的空间三维坐标;
7、选取距离目标最近的两个扬声器作为次级声源,利用双扬声器对目标进行实时降噪;
8、根据误差麦克风信号判断目标是否移动,对目标进行实时跟踪;
9、根据目标位置重新选择距离最近的两个扬声器作为次级声源,进行实时降噪。
10、根据本发明基于全向阵列的开放空间噪音污染控制方法,进一步地,所述构建球形扬声器全向阵列模型包括:
11、利用双扬声器作为次级声源发射反向声波,在人员目标双耳附近构建静音区;
12、以地平面为参考,建立笛卡尔坐标系,球形扬声器全向阵列距离地面高度为h,球心坐标为(0,0,h),半径为r,扬声器与z轴夹角俯仰角为θ,扬声器在xoy平面投影与x轴夹角方位角为φ,则扬声器中心li的坐标为:
13、li=(r sinθicosφi,r sinθisinφi,r cosθi+h) (1)
14、当扬声器的俯仰角和方位角(θi,φi)已知时,可计算得到扬声器的三维空间坐标。
15、根据本发明基于全向阵列的开放空间噪音污染控制方法,进一步地,利用地理经纬映射模型对扬声器覆盖空间进行划分:
16、根据扬声器的俯仰角和方位角(θi,φi)分别计算对应的经度和纬度,经度范围为(0,±180),纬度范围为(0,±90),对应的转换关系如公式(2):
17、
18、根据扬声器节点数量,按照经度30度,纬度15度进行空间分割,将全向阵列有序划分为一系列子空间;将扬声器对应的三维空间映射为地理经纬度。
19、根据本发明基于全向阵列的开放空间噪音污染控制方法,进一步地,所述控制系统扫描初始化,扬声器依次发射脉冲,并且测量到达目标的时间包括:
20、以经纬度(w150,n75)作为控制系统扫描参考起始点,依次通过扬声器节点发射脉冲信号,误差麦克风同步测量脉冲到达时间,从而计算扬声器节点与目标之间的距离;
21、当控制系统对所有扬声器节点测量完毕,计算所有扬声器节点与目标之间的距离,按照距离从小到大进行排序;扬声器距离目标越近,其分配的优先级越高。
22、根据本发明基于全向阵列的开放空间噪音污染控制方法,进一步地,所述求取目标的空间三维坐标包括:
23、通过获得扬声器节点与目标之间的到达时间,从而得到二者之间的空间距离;根据目标与多个已知扬声器节点之间的距离,实现对未知目标进行空间三维定位;理想情况下,以多个已知扬声器节点与目标的距离为半径的球面相交于一点,计算出目标节点的坐标;由于测量误差存在,导致其相交会存在一个区域,通过利用tikhonov正则化方法实现对目标的精准定位。
24、根据本发明基于全向阵列的开放空间噪音污染控制方法,进一步地,所述选取距离目标最近的两个扬声器作为次级声源,利用双扬声器对目标进行实时降噪,包括:
25、当目标位置已知时,控制系统选择距离目标最近的两个扬声器节点定义为中心节点,将其作为次级声源;
26、针对多目标和多噪声源,控制系统采用多通道anc系统,1×2×2anc系统由1个参考麦克风、2个次级声源和2个误差麦克风组成;采用nfxlms算法应用于1×2×2anc系统中,通过nfxlms算法控制次级声源发射抵消声波,与目标区域声场叠加,消除目标区域的噪声。
27、根据本发明基于全向阵列的开放空间噪音污染控制方法,进一步地,所述对目标进行实时跟踪包括:
28、控制系统将中心节点周围相邻最近的6个扬声器节点定义为卫星节点;当目标移动时,次级通路的突变会引起误差麦克风的误差信号增大,通过公式(3)计算上一个周期与下一个周期误差信号的功率;两次周期的误差信号功率变化比率大于δ时,则认为目标正在移动中,卫星节点依次发射脉冲信号对目标进行定位,否则,认为目标位置不变,卫星节点保持等待状态,以此实现对目标进行动态感知以及可视化显示跟踪;
29、pe(n)=λpe(n-1)+(1-λ)e(n)2 (3)
30、
31、其中,λ为遗忘因子,0.9<λ<1,pe(n)为误差信号e(n)的功率,n表示误差信号的样本量;pe_next(n)为下一个周期误差信号的功率,pe_previous(n)为上一个周期误差信号的功率。
32、根据本发明基于全向阵列的开放空间噪音污染控制方法,进一步地,控制系统中目标移动时会引起次级通路的改变,需要对次级通路进行在线拟合,采用lms算法对其进行拟合。
33、本发明还提供了一种基于全向阵列的开放空间噪音污染控制装置,包括球形扬声器全向阵列模型构建模块、脉冲到达时间测量模块、目标空间坐标计算模块、目标实时降噪模块一、目标动态感知及跟踪模块和目标实时降噪模块二,其中:
34、球形扬声器全向阵列模型构建模块,用于将多个次级声源扬声器布放在球体表面,并在球体内部填满聚酯吸音棉,构建球形扬声器全向阵列模型;
35、脉冲到达时间测量模块,用于控制系统扫描初始化,扬声器依次发射脉冲,并且测量到达目标的时间,将该时间记为toa;
36、目标空间坐标计算模块,用于计算确定距离目标最短的六个扬声器位置坐标,求取目标的空间三维坐标;
37、目标实时降噪模块一,用于选取距离目标最近的两个扬声器作为次级声源,利用双扬声器对目标进行实时降噪;
38、目标动态感知及跟踪模块,用于根据误差麦克风信号判断目标是否移动,对目标进行实时跟踪;
39、目标实时降噪模块二,用于根据目标位置重新选择距离最近的两个扬声器作为次级声源,进行实时降噪。
40、与现有技术相比,本发明具有以下优点:
41、本发明提出了基于全向阵列的开放空间噪音污染控制方法,利用扬声器声波传播的空间覆盖性,实现对移动人员目标的位置跟踪及噪声控制,从而使系统降噪具有全空间覆盖能力。为了对目标位置进行直观表达和可视化管理,本发明提出了地理经纬映射模型。通过双通道nfxlms算法,在人员目标左右耳附近实现噪声控制。实验结果表明,通过球形扬声器全向阵列有效实现对目标的动态感知及跟踪,因此,球形扬声器全向阵列控制系统对覆盖的空间能实现良好的降噪效果。研究结果对开放空间中的目标跟踪、目标特定范围内的环境噪音消除具有明显的实际指导意义。
网址:基于全向阵列的开放空间噪音污染控制方法及装置 https://www.yuejiaxmz.com/news/view/398331
相关内容
如何控制噪音污染 找对方法控制噪音污染最重要噪音污染控制措施.docx
控制噪声污染的方法专业交流论坛
环境噪声污染的监测及其控制策略
噪音控制方案.doc
治理噪音污染的方法和噪声污染防治办法
减少噪音污染的方法介绍
噪声控制基本方法(二)
噪音控制办法.docx
噪声污染控制措施
随便看看
最新动态分享
- 生活中有些废旧的东西怎么才能再次利用 举个例子 要实际方案
- 星级酒店旧布草,管理、再利用与创新价值
- 烟台市本地回收纸币,旧纸币的再利用与环保之路
- 虹口区回收纸币,旧纸币的再利用与价值重生
- 旧衣服穿不下去怎么处理 家居用品再利用
- 旧衣服再利用
- 旧床单被罩如何再利用
- 废旧钻头再利用,这些实用工具你绝对想不到
- 废弃品是可以再次利用的:烂袜子剪一刀,放在家里如此实用
- 家里旧物如何处理,分分钟把它变成宝
热点动态分享
- 2773
- 2657
- 2369
- 2297
- 2164
- 1805
- 1642
- 1491
- 1361
- 1304

