楼梯清洁机器人设计与研究
楼梯设计中的美学与实用性 #生活技巧# #家居装饰技巧# #装修设计灵感#
1. 引言
随着现代化、城市化进程的加快,城市高楼林立,繁重的楼道清洁工作引发了人们的关注为减轻楼道清洁工作,国内外学者对楼梯清洁机器人进行了大量的研究,但这些楼梯清洁机器人普遍存在结构复杂、清洁能力差等问题,最终都没能推向市场 [1] [2] [3] 。计算机技术、人工智能技术、传感器技术以及移动机器人技术的迅速发展,楼梯清洁机器人控制系统的研制与开发已具备了坚实的基础和良好的发展前景,因此,楼梯清洁机器人具有很高的可实施性。目前国内的楼梯清洁机器人还有很多方面有待完善,例如爬梯的稳定性与清洁的全面性等等,非常有研制的必要性。该研究利用三维数字化模型的建造,结合控制编程,重点研究了爬楼清洁机器人整体结构、尺寸分析、控制逻辑流程等问题,形成了可行性方案。
2. 楼梯清洁机器人总体结构
为确保楼梯清洁机器人工作稳定性和可靠性,我们采用了双直流电机控制机器人左右两边的履带,电动推杆连接麦克纳姆轮控制其位移结构,同时在机器人四周的功能结构上加装有能够将机器人抬起的丝杆。在楼梯清洁机器人的工作过程中,爬楼梯的履带始终向前爬行,麦克纳姆轮利用电动推杆抬起,不接触地面。当楼梯清洁机器人攀爬至台阶上时,楼梯清洁机器人两侧的麦克纳姆轮运用差速使楼梯清洁机器人进行左右平移,楼梯清洁机器人装设的扫地装置和拖地装置能够对台阶实施有效的清洁。楼梯清洁机器人的直流电机上装有编码盘,便于测速、测距使用。这种驱动系统采用了一个独立的可方便替换的模块,当机器人驱动系统发生故障时,只需简单维护,即可对驱动部分进行替换。同时为了楼梯清洁机器人能够灵活的运动,从动轮选用了万向轮。总体结构如图1所示。
楼梯清洁机器人工作时,首先用前摆臂将身体支撑起一定倾斜角度,然后将前丝杆上扬起来,通过后丝杆向前移动到台阶附近;当机身接触到楼梯边缘后,后丝杆抬升至机身后侧,协同后丝杆的摆动使后丝杆始终与地面接触,再利用爬楼梯履带对楼梯的抓爬力使得机器人继续向上爬,履带式机构对楼梯有很强的适应性 [4] ,适用于室内室外、不同尺寸的楼梯,在爬楼过程中运动稳定且不易打滑,具有较高的安全性。当机器人倾斜角达到预先设定角度时,后丝杆在保证机身倾斜角度的前提下实施逆时针摆动,直至机器人质心即将越过楼梯边沿时停止,此时顺时针摆动前丝杆,使得前丝杆接触到第二级楼梯的边缘,此时微调楼梯清洁机器人的前后丝杆角度,使前后丝杆履带与爬楼梯履带置于同一条直线上,至此机器人完成爬楼动作。楼梯清洁机器人的工作流程图2所示,其核心在于遇到楼梯时,避障程序自动启动。

Figure 1. Wheelchair module
图1. 楼梯清洁机器人总体结构图
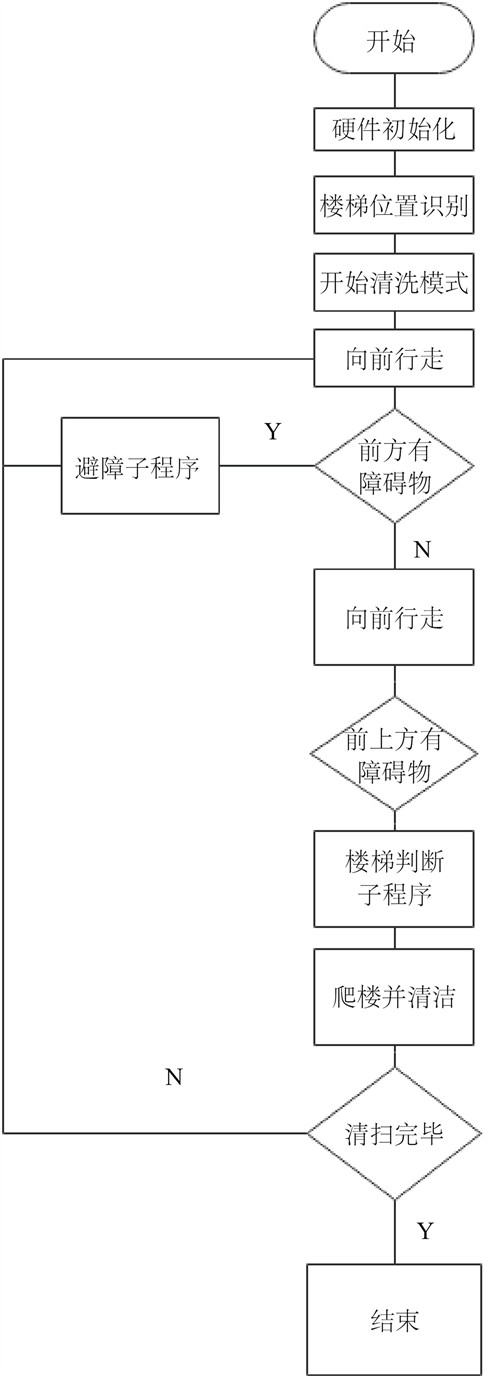
Figure 2. The working process of a staircase cleaning robot
图2. 楼梯清洁机器人的工作过程
3. 楼梯清洁机器人机构设计
3.1. 驱动机构设计
楼梯清洁机器人的爬楼运动和在平地上的运动主要是依靠履带与麦轮来实现,履带与楼梯相互啮合并带动载物台一同向楼梯方向运动,在向上运动过程中,通过倾角感应器检测载物台所在平面与水平面所成角度,传递信号给控制系统 [4] 。当楼梯清洁机器人在平地上时,依靠麦克纳姆轮前进与左右平移,当在楼梯上需要平移运动时,我们采用了四个直流步进电机直接与车轮相连,电机上装有编码盘,便于测速和测距。驱动轮的设计采用四轮独立的驱动方式,且各由步进电动机实施驱动,通过控制左右两边的轮速差来实现转向。这种驱动系统的优点在于独立且可方便替换的模块,当楼梯清洁机器人驱动系统发生故障时,只需简单步骤就可以对驱动部分进行替换。同时为了机器人能够灵活地运动,轮子均采用了麦克纳姆轮,以便于机器人爬楼与平移两不误。整体结构如图3所示。
从图3中可以看出,驱动机构的传动部分主要由履带装置、麦轮、丝杆和电机组成。楼梯清洁机器人在上楼时,当其遇到第一个楼梯后,丝杆将麦轮收回,机器人在履带的带动下进行爬升,履带表面附有凸起设计,可以让履带与楼梯相互啮合,以保证爬升的稳定性。当爬升到合适的位置后,麦轮在丝杆的带动下回到原位,以实现机器人左右平移所需。双履带机器人爬楼过程大致分为5个阶段:履带前侧搭上第一节台阶、履带与楼梯台阶两点接触、履带与楼梯台阶三点接触、履带前侧离开台阶、履带后侧离开台阶完成爬楼。
3.2. 扫地机构设计
扫地机构主要由尘盒、叶轮和圆刷等组成。扫地机构工作时,电机通过行星轮直接驱动四个圆刷。灰尘在圆刷的作用下扬起,并在叶轮提供的吸力的作用下,被吸到尘盒中。扫地机构运转后,底部的旋转毛刷将会清洁底部的小型垃圾,同时配合吸尘器将垃圾吸入尘盒之中,旋转毛刷可根据任务自动调节转速,清扫干净的同时避免把垃圾打飞,在地面清扫时转速为130转/分,当清理墙角的时候转速为350转/分。在清洁策略与路径选择层面,由于污渍与垃圾识别算法的加入,因此扫地机器人不再一概而论地对地面进行清洁,而是反复清洁重污区域直至清洁完毕或达到阔值为止 [5] 。扫地机构如图4所示
3.3. 拖地机构设计
拖地机构主要由拖布、水箱、辊轴、压力装置和电机组成。拖地机构的水箱通过弹簧连接着压力装置,当水箱感受到来自压力传感器的反馈时,水箱便会喷水,供拖布清洁楼梯使用。当机器人拖洗了一
定时间之后,拖布将会变脏,机器人将会执行换布动作,此时电动机将会带动辊轴转动,将脏的拖布带到一侧,与主箱配合清洗。配合主箱部分主要由超声波水箱和辊轴组成,其作用主要是对拖布进行清洗。清洗时,脏拖布全部浸在水箱中,在超声波的作用下,污渍便与拖布分离,从而实现清洗。清洗后,湿拖布在电机的带动下回到原来的位置,在此过程中拖布在辊轴提供的压力下实现干燥。拖地机构如图5所示。
4. 楼梯清洁机器人驱动过程
楼梯清洁机器人控制系统采用STM32F103单片机,以单片机为核心集成电机驱动模块、光电传感器模块、电子罗盘传感器模块以及红外测距传感器模块等硬件。在各模块相应软件程序控制下,实时采集地面以及楼梯信息,驱动有关的直流电机动作,实现楼梯清洁机器人的上下楼动作以及清扫工作。楼梯清洁机器人的驱动过程如图6所示。
基于该控制系统的综合功能与实现,楼梯清洁机器人不但可以识别不同的楼梯高度,而且可以0.06 m/s的速度行走,同时完成路径识别、避障等智能功能。其中红外测距传感器和防跌落传感器是核心传感模块。红外测距传感器实时探测道路信息,利用红外信号遇到障碍物距离的不同而反射的强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当车前的红外的检测方向遇到障碍物时,红外信号
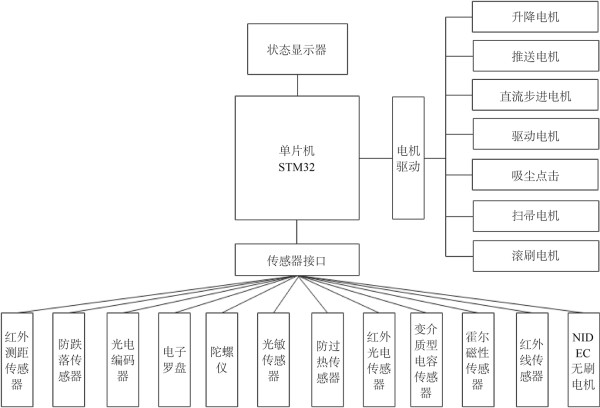
Figure 6. Driving process of staircase cleaning robot
图6. 楼梯清洁机器人驱动过程
反射回来被接收管接收,经过处理之后,即可利用红外线的返回信号来躲避车前的障碍物。同时,车底的两个红外测距传感器可测量彻底距离地面的高度,在机器人跨越楼梯时也可测量楼梯台阶的高度。机器人的两侧各装一个防跌落传感器。防跌落传感器是利用超声波进行测距。当机器人行进至台阶边缘时,防跌落传感器利用超声波测得机器人与地面之间的距离,当超过限定值时,向控制器发送信号,控制器控制机器人进行转向,改变机器人前进方向,从而实现防止跌落的目的。
5. 结论
当前越来越多的智能化产品进入千家万户的日常生活,但是楼梯清洁领域一直缺少一款智能化的产品及应用。基于此,本文设计了智能化楼梯清洁机器人,利用双履带结构实现机器人的爬升问题,利用麦克纳姆轮实现机器人平移问题,实现了平地和楼梯的良好运行,为楼梯清洁机器人市场提供了可行性方案。楼梯清洁机器人是一个集运动控制、方向辨别、规划执行等功能的智能系统,解决了以往市面上普通的扫地机器人只能在平面清洗的问题,目前已实现各模块反馈信号的自检,并通过检测结果对机器人所处工作状态进行剖析与干预,确保机器人稳定运行。
基金项目
本文得到了国家级大学生创业训练项目“多功能智保健康机器人平台与技术(项目编号:202313684007X)”的资助。
NOTES
*通讯作者。
网址:楼梯清洁机器人设计与研究 https://www.yuejiaxmz.com/news/view/430061
相关内容
基于51单片机楼梯清洁机器人控制系统设计泳池清洁机器人的研究与设计(88页)
一款高效家用清洁机器人设计研究.doc
让清洁机器人在园区内呼梯、梯控无阻
智能清洁机器人设计资料(18页)
楼梯清洁的秘诀
家庭助老服务机器人研究与设计
楼梯踏步板的清洁与保养
宿舍楼内的照明设计与舒适度研究.pptx
科技让生活更便利:楼梯攀爬机器人可助老助残
随便看看
最新动态分享
- 双阳台
- 玉屏齐云府丨当景观阳台遇上生活
- 为什么买房要选双阳台?看完你就懂了
- 美观又实用的阳台打造方案,为你的房子锦上添花
- 高颜值阳台改造案例,营造属于你的秘密花园
- 打造“阳台花园” 方寸之间有美景
- 幸福生活,绿意打造阳台
- 把阳台改造成景观花园,上传微信朋友圈,被好友赞爆了!
- 景观阳台的打造要点,掌握这些最重要
- 匠说 | 让阳光与清风,住进家里
热点动态分享
- 2805
- 2682
- 2546
- 2344
- 2201
- 1834
- 1651
- 1497
- 1384
- 1311

