TSP
1. TSP问题
旅行商问题(Travelling salesman problem, TSP)是运筹学和理论计算机科学中经典的问题.具体问题如下:给定一系列城市和每对城市之间的距离,求解访问每座城市一次并回到起始城市的最短回路.
2. 动态规划
本节参考旅行商问题(动态规划)
2.1 理论介绍
假设节点数较少的TSP问题,我们完全可以使用穷举的方式得到最优解,但是在穷举过程中一定存在很多重复的计算.这时候我们就可以使用动态规划来避免这些重复计算以提高效率.
熟悉动态规划的同学一定知道,凡是可以使用动态规划求解优化问题,说明问题本身一定含有最优子问题,换言之,求解得到最优解,一定是由子问题的最优解组成.
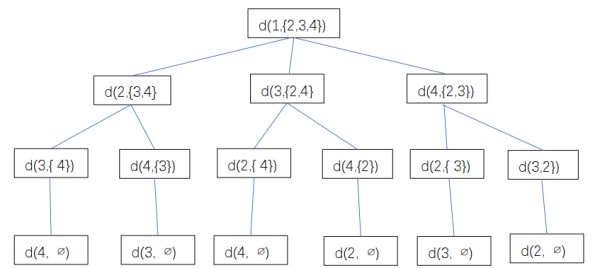
换成数学的语言表达即,假设当前问题是想知道从节点i出发,访问剩余节点集合V的最短路径,将该问题表达成
d ( i , V ) d(i, V) d(i,V)
假如下一个节点选择了k节点能使该问题有最优解,那么本问题必定包含了子问题 d ( k , V − { k } ) d(k, V-\{\mathrm k\}) d(k,V−{k}),即从节点k出发访问剩余节点集合 V − { k } V-\{\mathrm k\} V−{k}.这是显而易见的,不妨反过来想,如果子问题不是最优,那么本问题一定不是最优的.
经过上面的分析,不难得出下面的动态规划方程:
d ( i , V ) = { c i s , V = ∅ , i ≠ s min { c i k + d ( k , V − { k } ) } , k ∈ V , i ∉ V , V ≠ ∅ \mathrm d(\mathrm i,\mathrm V)={cis,V=∅,i≠smin{cik+d(k,V−{k})},k∈V,i∉V,V≠∅
d(i,V)={cis,min{cik+d(k,V−{k})},V=∅,i=sk∈V,i∈/V,V=∅
2.2 算法实现
有了上面的理论分析,基于动态规划求解TSP的算法实现就很容易理解.
利用动态规划方程我们很容易自底向上的计算各个子问题,直至得到我们想要求解的问题.具体操作就是使用一个DP表(下表是从节点0出发得到的DP表).
索引{null}{1}{2}{1,2}{3}{1, 3}{2, 3}{1,2,3}0///////d(0, {1,2,3})1c(0,1)/d(1,{2})/d{1,{3}}/d(1,{2,3})/2c(0,2)d(2,{1})//d(2,{3})d(2,{1,3})//3c(0,3)d(3,{1})d(3,{2})d(3,{1,2})////该表的更新顺序可以从左侧列开始递推到右侧列.注意DP表的维度,假设有n个节点(包含1个起始节点):
有n行有 2 n − 1 2^{n-1} 2n−1列递推过程还需要遍历n次比较求 min { c i k + d ( k , V − { k } ) } \min\{c_{ik}+\mathrm d(\mathrm k,\mathrm V-\{\mathrm k\})\} min{cik+d(k,V−{k})}.因此通过动态规划求解TSP问题的时间复杂度为 O ( 2 n n 2 ) O(2^n n^2) O(2nn2),因此大规模的TSP问题不能直接使用动态规划的方法求解.
def SolveTspByDp(nodes, close = False): """ @brief: 动态规划解决 旅行商 @note: 只适合小规模的运算 20个节点内 @param nodes: 节点数组,nodes[0]是起点 @param close: true-寻找最优的闭环路径(回到起点) false-非闭环最优路径 """ n = len(nodes) m = 1 << (n - 1) distances = np.zeros((n, n)) for i in range(n): for j in range(n): if i != j: distances[i][j] = (nodes[i] - nodes[j]).Norm() # dx = nodes[i][0] - nodes[j][0] # dy = nodes[i][1] - nodes[j][1] # distances[i][j] = math.sqrt(dx*dx + dy*dy) dp = [] for i in range(n): dp.append([1e10] * m) # 初始化DP表 if close: # 考虑回到起点的情况 for i in range(n): dp[i][0] = distances[i][0] else: # 不考虑回到起点的情况 for i in range(n): dp[i][0] = 0 for j in range(1, m): for i in range(1, n): dp[i][j] = 1e10 if j >> (i-1) & 1: continue for k in range(1, n): if not (1 << (k-1) & j): continue tmp = distances[i][k] + dp[k][j ^ (1 << (k-1))] if tmp < dp[i][j]: dp[i][j] = tmp # 初始化路径并插入起点 path = [0] s = m - 1 while True: minValue = 1e10 index = 0 for i in range(1, n): if not ((1 << (i-1)) & s): continue tmp = distances[path[-1]][i] + dp[i][s ^ (1 << (i-1))] if tmp < minValue: minValue = tmp index = i path.append(index) s = s ^ (1 << (index-1)) if not s: break return path
1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465666768697071723. 蚁群算法
本节参考
蚁群算法解决TSP问题详细讲解全局路径规划算法上面提到,当TSP问题的规模较大时,基于动态规划的方法效率太低,不适合求解.这时候可能难以求解全局最优解,而只能采用概率方式求解近似最优解.
蚁群算法(Ant Colony Optimization, ACO)是一种在图中寻找优化路径的几率性算法,其核心思想来源于蚂蚁寻找食物过程中发现路径的行为,是一种模拟进化算法.
蚁群求解TSP问题其实很直观,每一次迭代过程中会先随机投放m只蚂蚁,每只蚂蚁在每个节点时面临一个问题,即如何选择下一个节点?
3.1 节点的选择
节点的选择取决于两部分因素:
当前节点与其它节点的距离:该值是作为一个启发值引导蚂蚁优先选择到下一个节点代价更低的;信息素:信息素的名字就是直接来源于生物学上的叫法,其作用是根据历史迭代中总结的"经验",历史路径的距离越小则信息素浓度越高.往下一个节点移动的概率用公式表达如下:
p i j k ( t ) = { [ τ i j ( t ) ] α [ η i j ] β ∑ k ∈ unvisit [ τ i k ( t ) ] α [ η i k ] β , j ∈ unvisit k 0 , else η i j = 1 d i j p_{ij}^k(t)={[τij(t)]α[ηij]β∑k∈unvisit[τik(t)]α[ηik]β,j∈unvisitk0,else
\\ \eta_{ij} = \frac{1}{d_{ij}} pijk(t)={∑k∈unvisit[τik(t)]α[ηik]β[τij(t)]α[ηij]β,0,j∈unvisitkelseηij=dij1
其中:
t t t: 迭代次数 k k k: 第k只蚂蚁; i i i: 当前所在节点i; j j j: 下一个节点j; τ i j \tau_{ij} τij: 信息素 η i j \eta_{ij} ηij: 启发值,实际是两个节点的距离倒数,即距离越小,往该节点的前进的概率越大; α \alpha α: 信息素的权重因子 β \beta β: 启发值的权重因子根据上式,不难发现两个权重因子直接影响着蚂蚁每一步的决策, α \alpha α 过大会导致蚂蚁倾向走之前的路,搜索其它路径的趋势减小,容易陷入局部最优就难以再逃脱;相反, β \beta β 过大就越倾向于贪心算法,只往当前节点的最小值走.
有了以上节点的概率以后,只需要模拟该概率分布情况做一次采样即可,具体可使用轮盘赌法形式来选择,所谓轮盘堵法是,已知各个选择的概率,每个概率代表在单位长度上所占据的区域长度,然后在该单位长度上随机生成一个数,该值落在哪个区间则选择该节点.程序的实现可以使用cumsum:
probabilities = np.zeros(len(unvisit)) for k in range(len(unvisit)): probabilities[k] = np.power(pheromonetable[visiting][unvisit[k]], alpha) * \ np.power(eta[visiting][unvisit[k]], beta) # 使用轮盘赌选择下一个节点 # 累计概率 cumsum = (probabilities / sum(probabilities)).cumsum() cumsum -= np.random.rand() # 求出随机值处于哪个概率区间 next = unvisit[list(cumsum > 0).index(True)] 123456789101112
3.2 信息素更新
每只蚂蚁根据上面的规则选择路径后,即各自得到一条路径,这时候需要更新信息素(相当于总结归纳经验),以此来引导后面迭代蚂蚁的选择.具体的更新如下:
τ i j ( t + 1 ) = ( 1 − p ) τ i j ( t ) + Δ τ i j Δ τ i j = ∑ k = 1 m Δ τ i j k \tau_{ij}(t+1) = (1-p)\tau_{ij}(t) + \Delta \tau_{ij} \\ \Delta \tau_{ij} = \sum_{k=1}^{m} \Delta \tau_{ij}^k τij(t+1)=(1−p)τij(t)+ΔτijΔτij=k=1∑mΔτijk
其中,
Δ τ i j k \Delta \tau_{ij}^k Δτijk: 第k只蚂蚁在节点i与节点j连接路径上释放的信息素浓度; Δ τ i j \Delta \tau_{ij} Δτij: 所有蚂蚁在节点i与节点j连接路径上释放的信息素浓度总和; p p p: 信息素浓度的挥发率,很直观,就是衡量上一次迭代信息素浓度的保留程度每只蚂蚁在每个节点连接处增加的信息有3种方法:
蚁周模型蚁量模型蚁蜜模型直接引用上面博客中的描述
信息素增量不同信息素更新时刻不同信息素更新形式不同蚁周模型信息素增量为 Q / L k Q/L_k Q/Lk,它只与搜索路线有关与具体的路径(i,j)无关在第k只蚂蚁完成一次路径搜索后,对线路上所有路径进行信息素的更新信息素增量与本次搜索的整体线路有关,因此属于全局信息更新蚁量模型信息素增量为 Q / d i j Q/d_{ij} Q/dij,与路径(i,j)的长度有关在蚁群前进过程中进行,蚂蚁每完成一步移动后更新该路径上的信息素利用蚂蚁所走路径上的信息进行更新,因此属于局部信息更新蚁密模型信息素增量为固定值Q在蚁群前进过程中进行,蚂蚁每完成一步移动后更新该路径上的信息素利用蚂蚁所走路径上的信息进行更新,因此属于局部信息更新下面的程序将以 蚁周模型 方式更新信息素
3.3 算法实现
经过上面介绍,利用蚁群算法求解TSP问题伪代码可总结如下
初始化参数:建立距离表;设置权重因子;初始化信息素;初始化启发值;设置挥发系数 迭代开始: 将m只蚂蚁随机投放到节点中 为每只蚂蚁生成路径: 选择下一节点直至全部访问: 根据当前所在节点和选择下一节点的概率,随机选取下一节点 计算路径总长度 更新最优路径 更新信息素 输出路径 12345678910
def SolveTspByAC(nodes, ants = 100, maxIter = 200): """ @brief:Ant Colony 蚁群算法 解决大规模的TSP问题 """ numNode = len(nodes) distances = np.zeros((numNode, numNode)) for i in range(numNode): for j in range(numNode): if i == j: distances[i][j] = 1e10 else: # 根据输入的数据结构计算两个节点的距离 distances[i][j] = (nodes[i] - nodes[j]).norm() # 启发矩阵 eta = 1.0 / distances # 信息素 # 信息素权重因子 alpha = 1 # 启发函数权重因子 beta = 2 rho = 0.1 # 单只蚂蚁一条路径的信息素总和 Q = 1 # 信息素矩阵 pheromonetable = np.ones((numNode, numNode)) minLenght = 1e10 for iter in range(maxIter): # 记录每只蚂蚁的路径 paths = np.zeros((ants, numNode), dtype=np.int32) # 为每一只蚂蚁选择初始点 if ants <= numNode: paths[:, 0] = np.random.permutation(range(numNode))[:ants] else: paths[:numNode, 0] = np.random.permutation(range(numNode))[:] paths[numNode:, 0] = np.random.permutation(range(numNode))[: (ants - numNode)] # 记录每只蚂蚁的路径总长 lengths = np.zeros(ants) for i in range(ants): unvisit = list(range(numNode)) visiting = paths[i][0] unvisit.remove(visiting) for j in range(1, numNode): probabilities = np.zeros(len(unvisit)) for k in range(len(unvisit)): probabilities[k] = np.power(pheromonetable[visiting][unvisit[k]], alpha) * \ np.power(eta[visiting][unvisit[k]], beta) # 使用轮盘赌选择下一个节点 # 累计概率 cumsum = (probabilities / sum(probabilities)).cumsum() cumsum -= np.random.rand() # 求出随机值处于哪个概率区间 next = unvisit[list(cumsum > 0).index(True)] paths[i, j] = next unvisit.remove(next) lengths[i] += distances[visiting][next] visiting = next # 最后一个节点和第一个节点的距离也加上 是否必须? lengths[i] += distances[visiting][paths[i, 0]] # 更新最优路径 if minLenght > lengths.min(): minLenght = lengths.min() bestPath = paths[lengths.argmin()].copy() # 更新信息素 delta = np.zeros((numNode, numNode)) # for i in range(ants): # for j in range(numNode-1): # delta[paths[i, j]][paths[i, j+1]] += (Q / lengths[i]) # # 最后一个节点与第一个节点同样需要更新 # delta[paths[i, -1]][paths[i, 0]] += (Q / lengths[i]) for i in range(ants): for j in range(numNode-1): delta[paths[i, j]][paths[i, j+1]] += (Q / distances[paths[i, j]][paths[i, j+1]]) # 最后一个节点与第一个节点同样需要更新 delta[paths[i, j+1]][paths[i, 0]] += (Q / distances[paths[i, j+1]][paths[i, 0]]) pheromonetable = (1-rho) * pheromonetable + delta return bestPath
1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465666768697071727374757677787980818283848586878889909192939495需要注意的是:上面的实现,根据蚁周模型的更新公式,应该对应的是注释了的部分,但是实测发现收敛速度没有未注释的快,而未注释没有找到相关依据,只是参考了博客中如此实现,没有深入考究,但直观上还是说得通.
网址:TSP https://www.yuejiaxmz.com/news/view/488461
相关内容
【python】使用C算法设计与分析
群体智能算法之蚁群算法初探(二)
旅游路线规划:用数学建模优化旅行体验
旅行商问题+背包问题
10种可以DIY自制的烘培原料
环境现状监测
校园空气质量监测的方案.doc
节约里程法求解TSP问题
实用生活妙招:各种污渍如何去除?
随便看看
最新动态分享
- 亲身体验!如何在紧急情况下有效自救?
- 面对家中突发危险,如何冷静应对?
- 急救知识,生活必备
- 怎么样应对生活中遇到的一些紧急事件??
- 针对各种紧急情况的生...
- 50个生活急救小窍门,教你应对意外情况
- 紧急情况怎么办?5招实用技巧救你一命
- 如何应对突发事件
- 日常生活突发事故家庭急救“八戒”
- 生活急救常识(一)
热点动态分享
- 3010
- 2882
- 2816
- 2514
- 2329
- 1903
- 1672
- 1519
- 1494
- 1333

