一种多功能智能清洁机器人装置的制作方法
家居清洁神器:多功能扫地机器人使用方法 #生活乐趣# #生活分享# #家居生活方式# #实用家居用品#
本发明涉及机器人技术领域,具体为一种多功能智能清洁机器人装置。
背景技术:
机器人是一种能够半自主或全自主工作的机械,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,清洁机器人是机器人的一种。
在现有技术中,采用人形机器人或扁平式机器人作为清洁机器人,人形机器人虽然装置齐全,可以长期工作,但对于一些存在限高的地方(如床底、茶几底)难以很好的进行清洁操作,而扁平式机器人,虽然可以解决限高位置的清洁问题,但由于其装置本身大小极大程度上限制了清洁的效果(清洁力度过小同时可持续清洁时间过短),难以很好的满足使用者更好的使用需求。
技术实现要素:
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种多功能智能清洁机器人装置,解决了在现有技术中,采用人形机器人或扁平式机器人作为清洁机器人,人形机器人虽然装置齐全,可以长期工作,但对于一些存在限高的地方(如床底、茶几底)难以很好的进行清洁操作,而扁平式机器人,虽然可以解决限高位置的清洁问题,但由于其装置本身大小极大程度上限制了清洁的效果(清洁力度过小同时可持续清洁时间过短),难以很好的满足使用者更好的使用需求的问题。
(二)技术方案
为实现以上目的,本发明通过以下技术方案予以实现:一种多功能智能清洁机器人装置,包括容纳仓,所述容纳仓内设置有主电源,所述容纳仓的正表面设置有显示屏,所述容纳仓的左侧设置有仓门,所述容纳仓的右侧设置有主控制机构,所述容纳仓的正表面且位于显示屏的上方从左往右依次设置有麦克风和透气网板,所述容纳仓的底部通过第一伸缩杆固定连接有清洁机构,所述容纳仓底部的右侧设置有第一气泵,所述第一气泵的出气端与容纳仓内腔的底部连通,所述第一气泵的入气端连通有第一软管,所述清洁机构顶部的左侧设置有水箱;
所述清洁机构包括外框架和移动机构,所述水箱设置于外框架的顶部,所述水箱的底部连通有第一电控阀门,所述第一电控阀门的正下方设置有第一线圈环,所述第一线圈环固定镶嵌于外框架上,所述第一线圈环的下方吸附设置有第一永磁体,所述第一永磁体的下方设置有第二软管,所述移动机构的正表面分别设置有第二气泵和过渡箱,所述过渡箱上设置有过滤网板,所述第二气泵的出气端通过过渡管与过渡箱的内腔连通,所述过渡箱的顶部设置有第二电控阀门,所述第二电控阀门远离过渡箱的一端通过第三软管设置有第二永磁体,所述外框架顶部的右侧固定镶嵌有第二线圈环,所述第二永磁体吸附于第二线圈环的下方,所述第一软管的底端设置有第三永磁体,且第三永磁体吸附于第二线圈环的上方,所述外框架底部的两侧均设置有第二伸缩杆,所述外框架的底部设置有限位凸起,所述移动机构的顶部设置有与限位凸起配合设置的槽口,且槽口内腔的底部设置有触发按钮,所述外框架的正表面设置有第一红外测距传感器,所述移动机构的正表面设置有第二红外测距传感器;
所述移动机构包括移动外壳,所述移动外壳上活动设置有清理机构;
所述清理机构包括外环,所述外环上活动贯穿设置有活动中轴,所述活动中轴上设置有限位环,所述外环上且位于活动中轴的两侧分别活动贯穿设置有活动前轴和活动后轴,所述活动前轴的表面套设有前毛刷,所述活动后轴的表面套设有加热管,所述加热管的表面套设有后毛刷,所述活动中轴的表面且位于外环内设置有内驱动机构,所述内驱动机构的输出端分别与活动后轴和活动前轴传动连接,所述活动中轴上设置有电控喷头,所述电控喷头的入水端与第二软管的底端连通;
所述移动外壳包括外壳本体,所述外壳本体上设置有吸尘嘴,所述吸尘嘴相对于水平面垂直设置,吸尘嘴朝上的一端与第二气泵的入气口连通,所述外壳本体上设置有连接杆,所述连接杆活动贯穿设置于限位环内,所述外壳本体内设置有外驱动机构,所述外驱动机构的输出端设置有移动轴,所述移动轴的两端均设置有移动后轮,所述外壳本体内设置有转弯机构,所述转弯机构上设置有转弯前轮,所述外壳本体内设置有备用电源和副控制机构;
所述容纳仓内设置的主电源给备用电源、显示屏、主控制机构、麦克风、第一伸缩杆、第一气泵、第一电控阀门、第一线圈环和第二线圈环供电,所述备用电源给第二气泵、第二伸缩杆、第一红外测距传感器、第二红外测距传感器、触发按钮、内驱动机构、电控喷头、加热管、外驱动机构、副控制机构和转弯机构供电;
所述主控制机构蓝牙控制副控制机构工作,同时控制显示屏、麦克风、第一伸缩杆、第一气泵、第一电控阀门、第一线圈环和第二线圈环工作,所述副控制机构控制第二气泵、第二伸缩杆、第一红外测距传感器、第二红外测距传感器、触发按钮、内驱动机构、电控喷头、加热管、外驱动机构和转弯机构工作。
优选的,所述显示屏为触摸式显示屏。
优选的,所述水箱顶部的右侧设置有常开开口。
优选的,所述仓门的左侧设置有把手。
优选的,当外框架和移动机构配合设置时,限位凸起持续触发触发按钮。
(三)有益效果
本发明提供了一种多功能智能清洁机器人装置。具备以下有益效果:该多功能智能清洁机器人装置,通过一系列连接装置的改良,在采用人形机器人的基础上增设可实现自动拆卸组装的扁平式机器人,在保证清洁效率的同时可以很好的对存在限高的地方进行清洁操作,可以很好的满足使用者的使用需求。
附图说明
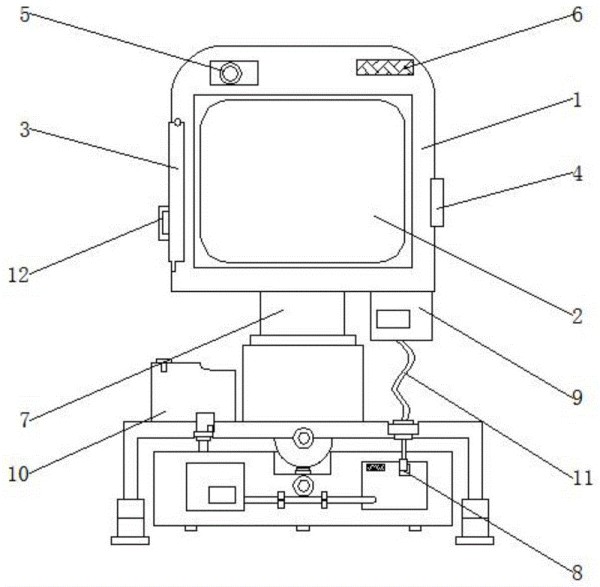
图1为本发明结构示意图;
图2为本发明清洁机构的结构示意图;
图3为本发明a-a的局部放大图;
图4为本发明移动机构的结构示意图;
图5为本发明清理机构的结构示意图;
图6为本发明移动外壳的结构示意图。
图中:1、容纳仓;2、显示屏;3、仓门;4、主控制机构;5、麦克风;6、透气网板;7、第一伸缩杆;8、清洁机构;801、第二电控阀门;802、第一线圈环;803、移动机构;8031、清理机构;80311、活动中轴;80312、内驱动机构;80313、活动后轴;80314、加热管;80315、活动前轴;80316、前毛刷;80317、电控喷头;80318、外环;80319、后毛刷;803110、限位环;8032、移动外壳;80321、转弯前轮;80322、副控制机构;80323、备用电源;80324、连接杆;80325、外驱动机构;80326、转弯机构;80327、外壳本体;80328、移动后轮;80329、移动轴;803210、吸尘嘴;804、第二伸缩杆;805、第二气泵;806、第一永磁体;807、第三永磁体;808、第二线圈环;809、外框架;810、第二永磁体;811、第三软管;812、过滤网板;813、过渡箱;814、过渡管;815、第一电控阀门;816、第二软管;817、第二红外测距传感器;818、限位凸起;819、触发按钮;820、第一红外测距传感器;9、第一气泵;10、水箱;11、第一软管;12、把手。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,本发明提供一种技术方案:一种多功能智能清洁机器人装置,包括容纳仓1,容纳仓1内设置有主电源,容纳仓1的正表面设置有显示屏2,显示屏2为触摸式显示屏,容纳仓1的左侧设置有仓门3,仓门3的左侧设置有把手12,容纳仓1的右侧设置有主控制机构4,容纳仓1的正表面且位于显示屏2的上方从左往右依次设置有麦克风5和透气网板6,容纳仓1的底部通过第一伸缩杆7固定连接有清洁机构8,容纳仓1底部的右侧设置有第一气泵9,第一气泵9的出气端与容纳仓1内腔的底部连通,第一气泵9的入气端连通有第一软管11,清洁机构8顶部的左侧设置有水箱10,水箱10顶部的右侧设置有常开开口;
清洁机构8包括外框架809和移动机构803,当外框架809和移动机构803配合设置时,限位凸起818持续触发触发按钮819,水箱10设置于外框架809的顶部,水箱10的底部连通有第一电控阀门815,第一电控阀门815的正下方设置有第一线圈环802,第一线圈环802固定镶嵌于外框架809上,第一线圈环802的下方吸附设置有第一永磁体806,第一永磁体806的下方设置有第二软管816,移动机构803的正表面分别设置有第二气泵805和过渡箱813,过渡箱813上设置有过滤网板812,第二气泵805的出气端通过过渡管814与过渡箱813的内腔连通,过渡箱813的顶部设置有第二电控阀门801,第二电控阀门801远离过渡箱813的一端通过第三软管811设置有第二永磁体810,外框架809顶部的右侧固定镶嵌有第二线圈环808,第二永磁体810吸附于第二线圈环808的下方,第一软管11的底端设置有第三永磁体807,且第三永磁体807吸附于第二线圈环808的上方,外框架809底部的两侧均设置有第二伸缩杆804,外框架809的底部设置有限位凸起818,移动机构803的顶部设置有与限位凸起818配合设置的槽口,且槽口内腔的底部设置有触发按钮819,外框架809的正表面设置有第一红外测距传感器820,移动机构803的正表面设置有第二红外测距传感器817;
移动机构803包括移动外壳8032,移动外壳8032上活动设置有清理机构8031;
清理机构8031包括外环80318,外环80318上活动贯穿设置有活动中轴80311,活动中轴80311上设置有限位环803110,外环80318上且位于活动中轴80311的两侧分别活动贯穿设置有活动前轴80315和活动后轴80313,活动前轴80315的表面套设有前毛刷80316,活动后轴80313的表面套设有加热管80314,加热管80314的表面套设有后毛刷80319,活动中轴80311的表面且位于外环80318内设置有内驱动机构80312,内驱动机构80312的输出端分别与活动后轴80313和活动前轴80315传动连接,活动中轴80311上设置有电控喷头80317,电控喷头80317的入水端与第二软管816的底端连通;
移动外壳8032包括外壳本体80327,外壳本体80327上设置有吸尘嘴803210,吸尘嘴803210相对于水平面垂直设置,吸尘嘴803210朝上的一端与第二气泵805的入气口连通,外壳本体80327上设置有连接杆80324,连接杆80324活动贯穿设置于限位环803110内,外壳本体80327内设置有外驱动机构80325,外驱动机构80325的输出端设置有移动轴80329,移动轴80329的两端均设置有移动后轮80328,外壳本体80327内设置有转弯机构80326,转弯机构80326上设置有转弯前轮80321,外壳本体80327内设置有备用电源80323和副控制机构80322;
容纳仓1内设置的主电源给备用电源80323、显示屏2、主控制机构4、麦克风5、第一伸缩杆7、第一气泵9、第一电控阀门815、第一线圈环802和第二线圈环808供电,备用电源80323给第二气泵805、第二伸缩杆804、第一红外测距传感器820、第二红外测距传感器817、触发按钮819、内驱动机构80312、电控喷头80317、加热管80314、外驱动机构80325、副控制机构80322和转弯机构80326供电;
主控制机构4蓝牙控制副控制机构80322工作,同时控制显示屏2、麦克风5、第一伸缩杆7、第一气泵9、第一电控阀门815、第一线圈环802和第二线圈环808工作,副控制机构80322控制第二气泵805、第二伸缩杆804、第一红外测距传感器820、第二红外测距传感器817、触发按钮819、内驱动机构80312、电控喷头80317、加热管80314、外驱动机构80325和转弯机构80326工作。
工作时,通过主控制机构4蓝牙控制副控制机构80322工作,同时控制显示屏2、麦克风5、第一伸缩杆7、第一气泵9、第一电控阀门815、第一线圈环802和第二线圈环808工作,通过副控制机构80322控制第二气泵805、第二伸缩杆804、第一红外测距传感器820、第二红外测距传感器817、触发按钮819、内驱动机构80312、电控喷头80317、加热管80314、外驱动机构80325和转弯机构80326工作。
工作前,在水箱10内装入清洁用水,通过显示屏2设定清洁路径和清洁模式,并控制装置工作。
通过内驱动机构80312带动前毛刷80316和后毛刷80319转动,同时控制电控喷头80317将水箱10内的清洁用水喷出,以此进行水清洁操作,可以通过控制第一气泵9和第二气泵805在吸尘嘴803210附近提供负压,将灰尘吸入至过渡箱8013内,并最后吸入至容纳仓1内,以此进行吸尘清洁操作,可以通过调节加热管80314的电压调节加热管80314的温度,并在加热管80314的作用下根据使用者需求快速烘干地面,保证地面的干燥性(具体如何使用水清洁操作、吸尘清洁操作还是烘干地面操作均在工作前的清洁模式中设置,由于系统部分和电路控制部分可以基于现有技术达到,且具体实施时情况众多,又不在本专利保护范围内,因此未加说明)。
通过外驱动机构80325带动移动后轮80328移动,同时通过转弯机构80326控制转弯前轮80321的朝向,以此实现装置的移动。
当第一红外测距传感器820检测到前方存在阻挡物,但第二红外测距传感器817检测到前方不存在阻挡物时,且根据清理路径需要对前方进行清理操作时,进行分离操作。
分离操作:进行分离操作时,切断第一线圈环802和第二线圈环808的电源,关闭第一气泵9,从而使得两者附近的磁场消失,关闭第一电控阀门815,控制第二伸缩杆804进行伸长操作,从而使得外框架809相对于移动机构803向上移动,同时关闭第二电控阀门801,并控制移动机构803移动,同时进行分离清洁操作。
分离清洁操作:通过第二气泵805在吸尘嘴803210附近提供负压,将灰尘吸入至过渡箱8013内,以此进行分离吸尘清洁操作,可以通过调节加热管80314的电压调节加热管80314的温度,并在加热管80314的作用下根据使用者需求快速烘干地面,保证地面的干燥性。
分离清洁操作后需要进行组装操作,从而使得外框架809相对于移动机构803组合,随后继续进行清理操作。
组装操作:控制移动机构803以原路返回(此处原路,为分离清洁操作后的移动路线),从而使得移动机构803移动至外框架809下,控制第二伸缩杆804进行缩短操作,直至限位凸起818触发触发按钮819,若存在位置误差,会在限位凸起818和移动机构803上方设置的槽口的作用下使得限位凸起818滑动至槽口内,从而对移动机构803的相对位置进行调整,接通第一线圈环802和第二线圈环808的电源,从而使得第一线圈环802和第二线圈环808产生磁场并吸附第一永磁体806和第二永磁体810,随后打开第一电控阀门815和第二电控阀门801,以此实现清洗用水和第一气泵9通路的接通,随后继续进行清洁操作。
综上所述,该多功能智能清洁机器人装置,通过一系列连接装置的改良,在采用人形机器人的基础上增设可实现自动拆卸组装的扁平式机器人,在保证清洁效率的同时可以很好的对存在限高的地方进行清洁操作,可以很好的满足使用者的使用需求。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
网址:一种多功能智能清洁机器人装置的制作方法 https://www.yuejiaxmz.com/news/view/498471
相关内容
一种多功能智能绿植养护机器人的制作方法多功能扫地机器人的制作方法
什么是智能清洁机器人?智能清洁机器人的种类及功能
一种多功能智能储物柜的制作方法
一种多功能烹饪器具的制作方法
智能清洁机器人怎么样?智能清洁机器人种类介绍
一种具有消毒功能的智能刀具放置架的制作方法
一种多功能地面清洁机器人的机械结构设计(开题报告)
一种高效玻璃清洁装置的制作方法
【智能清洁机器人】怎么样的清洁机器人才算得上是智能清洁机器人
随便看看
最新动态分享
- 餐具的管理方案.doc
- 酒店餐具存放标准,细节决定成败
- 一种餐盒自动售卖机及餐具储存仓制造技术
- 学校餐具消毒方案.docx
- 酒店存储餐具,细节决定成败
- 餐具使用场景建模方案,餐具使用场景建模方案模板
- 我把送的储藏间收拾干净了,把餐具先搬来, 真的买的时候爽,搬的时候想死
- 酒店餐具洗刷工作的重要性及方法
- 史淑荣医生:白血病患者的餐具需要单独存放吗?
- 医院食堂承包的食品安全保障措施
热点动态分享
- 2819
- 2691
- 2606
- 2349
- 2205
- 1835
- 1651
- 1499
- 1392
- 1312

