多功能智能清洁机器人
懒人清洁:多功能吸尘器,一机多用,清洁更高效。 #生活技巧# #居家生活技巧# #懒人生活技巧# #懒人神器#
1.本发明涉及清洁机器人领域,特别涉及多功能智能清洁机器人。
背景技术:
2.随着智能家居技术的不断发展,越来越多的智能设备应用于人们的生活中,代替用户完成一些家庭工作,给人们的生活带来了较大的便利。在智能家居领域中,智能机器人是重要组成部分,根据功能的不同,市面上出现了各式各样的家居智能机器人,例如扫地机器人、空气净化机器人等。
3.但是,现有的智能机器人的功能较为单一,用户如果需要更好的体验,实现不同的功能,则需要购买不同种类的机器人,经济成本更高,而且占用空间也更大。而且,对于单一种类的机器人来说,如果能够将不同机器人的功能进行整合并同时工作,会带来更好的效果,例如在机器人移动清洁的过程中如果能够进行空气净化操作,就能够在实现地面清洁的同时更大范围地净化室内空气,而现有的家居机器人显然不具备上述效果,使用的灵活程度较低。
技术实现要素:
4.本发明的目的在于,提供多功能智能清洁机器人。本发明的功能更加丰富,占用的空间更小,集成度和使用的灵活程度更高。
5.本发明的技术方案:多功能智能清洁机器人,包括外壳,外壳的内部设有控制电路,外壳的底部设有行走组件和清洁组件,所述外壳的内部设有旋转底座和用于驱动旋转底座转动的电机,旋转底座的上侧设有多个垃圾桶,每个垃圾桶的桶口处均设有打包组件;所述外壳的顶部设有顶盖,顶盖的表面设有投掷口,顶盖的内壁设有电动滑轨,电动滑轨上设有挡板;所述顶盖的上侧设有识别摄像头,识别摄像头、电机和电动滑轨均与控制电路相连接;
6.所述外壳内设有净化组件,净化组件包括设置在外壳内部的滤芯,外壳内部还设有吸风机,吸风机与控制电路相连接,吸风机的进气端与滤芯的出气口连通,吸风机的出气端连接有导气管;所述外壳的内部设有气室,导气管的上端与气室相连通;所述外壳的表面设有与气室相连通的出气口;
7.所述外壳的侧部设有杀虫组件,杀虫组件包括设置在外壳侧部的紫外光灯和低伏电网,紫外光灯和低伏电网均与控制电路相连接。
8.前述的多功能智能清洁机器人中,所述行走组件包括设置在外壳底部的万向轮和用于驱动万向轮转动的行走电机;所述外壳的侧部设有行走摄像头,行走摄像头和行走电机均与控制电路相连接。
9.前述的多功能智能清洁机器人中,所述清洁组件包括设置在外壳内部的吸尘器,吸尘器与控制电路相连接,外壳的底部设有与吸尘器相连接的吸尘孔;所述外壳的内部设有尘盒,吸尘器的出气端与尘盒内部相连通;所述清洁组件还包括设置在外壳底部的边刷,
边刷的上部设有清洁电机,清洁电机与控制电路相连接;所述外壳的底部还设有拖布。
10.前述的多功能智能清洁机器人中,所述外壳内部设有盒体,所述尘盒位于盒体内部,并且尘盒呈抽屉式结构;所述外壳的侧部设有与盒体内部连通的开口,开口内设有封板。
11.前述的多功能智能清洁机器人中,所述打包组件包括设置在垃圾桶桶口处的固定框,固定框的上侧设有可拆卸的限位框,限位框用于压紧垃圾袋的袋口;所述固定框的内壁设有两个相互垂直的导轨,导轨上设有滑套,其中一个滑套的侧部设有第一热熔臂,另一个滑套的侧部设有第二热熔臂;两个所述导轨相靠近的一端均设有电热元件,电热元件与控制电路相连接。
12.前述的多功能智能清洁机器人中,所述外壳的内壁设有安装架,所述气室由外壳的内壁、垃圾桶的外壁、安装架的下表面和旋转底座的上表面包围而成。
13.前述的多功能智能清洁机器人中,所述外壳的表面设有进气格栅,进气格栅正对滤芯的进气端设置。
14.前述的多功能智能清洁机器人中,所述第一热熔臂和第二热熔臂相互垂直,第二热熔臂呈u型结构,第一热熔臂位于第二热熔臂的u型槽内。
15.前述的多功能智能清洁机器人中,所述外壳的表面设有环形槽,紫外光灯和低伏电网均设置在环形槽内。
16.前述的多功能智能清洁机器人中,所述外壳的侧部设有用于对拖布进行清洗的清洗组件,清洗组件包括设置在外壳侧部的清洗区,清洗区内部设置有隔板,隔板上设有电动轨道,电动轨道上设有能够上下滑动的移动臂;所述清洗区的底部设置有u型结构的通槽,移动臂向下穿过通槽并铰接有安装臂,拖布设置在安装臂上;所述移动臂的下端设有舵机,舵机的输出轴与安装臂相连接;所述隔板上设有导轨,导轨上设有滑轮,滑轮的侧部设置有安装架,安装架上从上至下依次设有喷水管、滚筒和刮水板;所述外壳的侧部设置有水箱,水箱通过泵水装置与喷水管连接;所述清洗区的下侧设有污水槽,污水槽的上方设置有与清洗区连通的渗水孔;所述外壳内部设有污水箱,污水箱通过排水装置与污水槽连通,污水箱内设有除菌灯,污水箱的侧部设有排水口。
17.与现有技术相比,本发明具有以下有益效果:
18.1、本发明设有行走组件和清洁组件,能够实现地面清洁的效果,还设有空气净化组件,通过吸风机将空气吸入,经过滤芯的过滤后从出气口排出,能够实现对室内空气的净化效果,此外,本发明还设有杀虫组件,通过紫外光灯引诱虫子,然后通过低伏电网杀灭虫子,能够起到杀虫的效果。综上,本发明将地面清洁、空气净化和害虫杀灭的功能进行整合,仅通过一个智能机器人即可实现上述不同功能,功能更加丰富,装置的集成度更高,而且占用空间更小。此外,在进行地面清洁的过程中,可以同时启动空气净化组件,从而实现在清洁地面的同时大范围净化室内空气的效果,使用的灵活程度更高。
19.2、本发明中,在每个垃圾桶的桶口处均设有打包组件,打包组件包括设置在垃圾桶桶口处的固定框,固定框的上侧设有可拆卸的限位框,限位框用于压紧垃圾袋的袋口,固定框的内壁设有两个相互垂直的导轨,导轨上设有滑套,其中一个滑套的侧部设有第一热熔臂,另一个滑套的侧部设有第二热熔臂,两个导轨相靠近的一端均设有电热元件,电热元件与控制电路相连接;需要对垃圾袋进行封口打包时,只需要启动导轨,使得两个滑套相互
靠近,从而带动第一热熔臂和第二热熔臂移动,从而将垃圾袋的袋口收紧汇集至电热元件所在的区域,然后通过电热元件对垃圾袋的袋口进行加热处理,从而使得垃圾袋的袋口热熔封口,方便工作人员对垃圾进行集中处理。
20.3、本发明中,在顶盖上设置有识别摄像头,顶盖的表面设有投掷口,顶盖的内壁设有电动滑轨,电动滑轨上设有挡板。用户需要扔垃圾时,识别摄像头会自动识别垃圾的种类,并将信号传输至控制电路,控制电路控制电机运转,带动旋转底座和垃圾桶转动,将对应类别的垃圾桶转动至投掷口的下方,同时,电动滑轨控制挡板移动,将投掷口打开,此时,用户即可将垃圾扔到对应的垃圾桶中,方便对垃圾进行分类处理。在扔完垃圾后,电动滑轨控制挡板移动,将投掷口遮挡住,减少垃圾散发到环境中的异味。
21.4、本发明中,在外壳的侧部设置有用于对拖布进行清洗的清洗组件,通过电动轨道和舵机调整拖布的位置,使得拖布紧靠隔板,然后通过喷水管打湿拖布,并通过滚筒和刮水板的上下移动对拖布进行挤压刮水,能够实现对拖布的清洗,使得拖布保持较为整洁的状态,方便拖布的多次使用。
附图说明
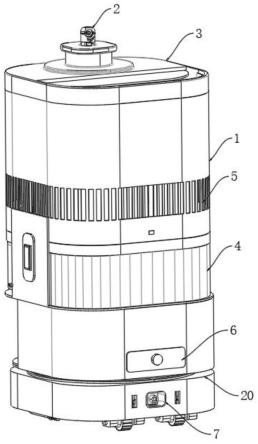
22.图1是本发明的正面结构示意图;
23.图2是本发明的背面结构示意图;
24.图3是本发明中顶盖的结构示意图;
25.图4是本发明中垃圾桶和打包组件的装配图;
26.图5是本发明中打包组件的结构示意图;
27.图6是本发明中外壳与安装架的装配图;
28.图7是本发明中净化组件的结构示意图;
29.图8是本发明中外壳下部的结构示意图;
30.图9是本发明中外壳底部的结构示意图;
31.图10是本发明中清洗区的结构示意图;
32.图11是本发明中导轨和喷水管的装配图;
33.图12是本发明中移动臂和安装臂的装配图。
34.附图中的标记为:1-外壳;2-识别摄像头;3-顶盖;4-进气格栅;5-出气口;6-封板;7-行走摄像头;8-投掷口;9-挡板;10-旋转底座;11-垃圾桶;12-限位框;13-固定框;14-导轨;15-滑套;16-第一热熔臂;17-第二热熔臂;18-电热元件;19-安装架;20-环形槽;21-滤芯;22-导气管;23-吸尘孔;24-盒体;25-万向轮;26-边刷;27-水箱;28-排水口;29-隔板;30-清洗区;31-导轨;32-滑轮;33-电动轨道;34-移动臂;35-通槽;36-安装架;37-喷水管;38-滚筒;39-刮水板;40-污水箱;41-除菌灯;42-安装臂;43-舵机;44-拖布;45-渗水孔。
具体实施方式
35.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
36.实施例:多功能智能清洁机器人,如附图1和附图2所示,包括外壳1,外壳1的内部设有控制电路,外壳1的底部设有行走组件和清洁组件,如附图9所示,所述行走组件包括设
置在外壳1底部的万向轮25和用于驱动万向轮25转动的行走电机;所述外壳1的侧部设有行走摄像头7,行走摄像头7和行走电机均与控制电路相连接,行走摄像头7能够识别当前的行走环境,并将信号传递至控制电路,控制电路根据接收的信号控制行走电机运转,从而带动万向轮25转动,带动机器人移动至目标区域。
37.所述清洁组件包括设置在外壳1内部的吸尘器,吸尘器与控制电路相连接,外壳1的底部设有与吸尘器相连接的吸尘孔23;所述外壳的内部设有尘盒,吸尘器的出气端与尘盒内部相连通;控制电路控制吸尘器运转,从而将地面上的灰尘从吸尘孔23吸入,并排出至尘盒内进行收集。如附图8所示,所述外壳1内部设有盒体24,所述尘盒位于盒体24内部,并且尘盒呈抽屉式结构;所述外壳1的侧部设有与盒体24内部连通的开口,开口内设有封板6,封板6可通过卡扣等形式固定在开口内,在尘盒内收集的灰尘杂质过多时,用户可以打开封板6,将尘盒从盒体24内抽出清理。所述清洁组件还包括设置在外壳1底部的边刷26,边刷26的上部设有清洁电机,清洁电机与控制电路相连接,控制电路控制清洁电机运转,进而带动边刷26转动,能够对地面进行刷洗;所述外壳1的底部还设有拖布44。
38.所述外壳1的侧部设有用于对拖布44进行清洗的清洗组件,清洗组件包括设置在外壳1侧部的清洗区30,如附图10所示,清洗区30内部设置有隔板29,隔板29上设有电动轨道33,如附图12所示,电动轨道33上设有能够上下滑动的移动臂34;所述清洗区30的底部设置有u型结构的通槽35,移动臂34向下穿过通槽35并铰接有安装臂42,拖布44设置在安装臂42上;初始状态下,移动臂34位于电动轨道33的下部,使得拖布44能够与地面接触。所述移动臂34的下端设有舵机43,舵机43的输出轴与安装臂42相连接;如附图11所示,所述隔板29上设有导轨31,导轨31上设有滑轮32,滑轮32的侧部设置有安装架36,安装架36上从上至下依次设有喷水管37、滚筒38和刮水板39,其中喷水管37为带有多个喷水孔的管道;导轨31包括位于下侧的倾斜段和位于上侧的竖直段,设置倾斜段能够使得辊筒38和刮水板39在移动过程中向拖布44靠近,并对拖布44进行挤压,提高对拖布44的清洁效果。所述外壳1的侧部设置有水箱27,水箱27通过泵水装置与喷水管37连接,泵水装置包括水泵和管道等;所述清洗区30的下侧设有污水槽,污水槽的上方设置有与清洗区30连通的渗水孔45;进一步地,隔板29表面设置有多条流道,方便水流沿着流道流下,避免水流流到各处。所述外壳1内部设有污水箱40,污水箱40通过排水装置与污水槽连通,排水装置包括用于抽水的抽水泵和管道等,污水箱40内设有除菌灯41,能够对污水箱40内的空间进行除菌,污水箱40的侧部设有排水口28。
39.在需要对拖布44进行清洗时,只需要启动电动轨道33,带动移动臂34和安装臂42上移,将拖布44移动到清洗区30内,然后启动舵机43,带动安装臂42向上转动,从而带动拖布44向上转动,使得拖布44紧靠隔板29,然后启动泵水装置,将水箱27内的水从喷水管37喷出到拖布44的表面,然后启动导轨31,带动滚筒38和刮水板39上下移动,滚筒38和刮水板39上下移动的过程中能够对拖布44进行挤压和刮水操作,从而将拖布44上的污渍刮除,对拖布44进行清洗。在清洗过程中,刮除的水沿着隔板29向下流动,并通过渗水孔45进入到污水槽内,然后通过排水装置将污水吸入到污水箱40中,当污水箱40内储存的污水足够多时,可以打开排水口28,将污水箱40内的水排出。通过上述操作即可实现对拖布44的自动清洁,使得拖布44保持一个整洁的状态,方便拖布44的多次使用。
40.如附图4所示,所述外壳1的内部设有旋转底座10和用于驱动旋转底座10转动的电
机,旋转底座10的上侧设有多个垃圾桶11,每个垃圾桶11的桶口处均设有打包组件;如附图5所示,所述打包组件包括设置在垃圾桶11桶口处的固定框13,固定框13的上侧设有可拆卸的限位框12,限位框12用于压紧垃圾袋的袋口;具体的,限位框12与固定框13的装配方式包括但不限于以下方式:在固定框13的上表面设置凸台,在限位框12的下表面设置与凸台相匹配的凹槽,安装时将限位框12置于固定框13上侧并使得凸台卡进凹槽内。所述固定框13的内壁设有两个相互垂直的导轨14,导轨14为电控轨道,由控制电路控制,导轨14上设有滑套15,其中一个滑套15的侧部设有第一热熔臂16,另一个滑套15的侧部设有第二热熔臂17,所述第一热熔臂16和第二热熔臂17相互垂直,第二热熔臂17呈u型结构,第一热熔臂16位于第二热熔臂17的u型槽内;两个所述导轨14相靠近的一端均设有电热元件18,电热元件18与控制电路相连接,初始状态下,两个滑套15均位于对应导轨14相互远离的一端,在需要对垃圾袋进行封口打包时,只需要启动导轨14,使得两个滑套15相互靠近,从而带动第一热熔臂16和第二热熔臂17移动,从而将垃圾袋的袋口收紧汇集至电热元件18所在的区域,然后通过电热元件18对垃圾袋的袋口进行加热处理,从而使得垃圾袋的袋口热熔封口,方便工作人员对垃圾进行集中处理。如附图3所示,所述外壳1的顶部设有顶盖3,顶盖3的表面设有投掷口8,顶盖3的内壁设有电动滑轨,电动滑轨上设有挡板9;所述顶盖3的上侧设有识别摄像头2,识别摄像头2、电机和电动滑轨均与控制电路相连接;初始状态下,挡板9将投掷口8完全遮挡住,用户需要扔垃圾时,识别摄像头2会自动识别垃圾的种类,并将信号传输至控制电路,控制电路控制电机运转,带动旋转底座10和垃圾桶11转动,将对应类别的垃圾桶11转动至投掷口8的下方,同时,电动滑轨控制挡板9移动,将投掷口8打开,此时,用户即可将垃圾扔到对应的垃圾桶11中,方便对垃圾进行分类处理。在扔完垃圾后,电动滑轨控制挡板9移动,将投掷口8遮挡住,减少垃圾散发到环境中的异味。
41.所述外壳1内设有净化组件,如附图7所示,净化组件包括设置在外壳1内部的滤芯21,所述外壳1的表面设有进气格栅4,进气格栅4正对滤芯21的进气端设置;外壳1内部还设有吸风机,吸风机与控制电路相连接,吸风机的进气端与滤芯21的出气口连通,吸风机的出气端连接有导气管22;所述外壳1的内部设有气室,如附图6所示,所述外壳1的内壁设有安装架19,所述气室由外壳1的内壁、垃圾桶11的外壁、安装架19的下表面和旋转底座10的上表面包围而成,导气管22的上端与气室相连通;所述外壳1的表面设有与气室相连通的出气口5;控制电路控制吸风机启动,将环境中的空气从进气格栅4吸入,空气经过滤芯21进行过滤和净化,净化后的空气通过导气管22进入到气室,最终从出气口5排出到环境中,从而实现对空气的净化和过滤处理,提高环境中的空气质量。
42.所述外壳1的侧部设有杀虫组件,杀虫组件包括设置在外壳1侧部的紫外光灯和低伏电网,所述外壳1的表面设有环形槽20,紫外光灯和低伏电网均设置在环形槽20内,紫外光灯和低伏电网均与控制电路相连接。紫外光灯能够吸引虫子来到环形槽20附近,然后通过低伏电网杀灭虫子,从而起到杀虫的功能。
网址:多功能智能清洁机器人 https://www.yuejiaxmz.com/news/view/498472
相关内容
什么是智能清洁机器人?智能清洁机器人的种类及功能管家机器人五大功能之“智能清洁”
智能清洁机器人(智能保洁机器人)
「智能清洁机器人」智能清洁机器人公司黄页
多功能安防清洁机器人 -挑战杯
【智能清洁机器人】怎么样的清洁机器人才算得上是智能清洁机器人
智能清洁机器人
「智能机器人清洁」智能机器人清洁公司黄页
topan智能清洁机器人
医院清洁神器:DY-智能清洁机器人
随便看看
最新动态分享
- 南京至海南经济出行攻略:最省钱交通方式及省钱旅行小贴士
- 【旅徒】在欧洲旅行的20个省钱小贴士
- 张家界旅行实用行程 + 省钱小贴士 必玩景点推荐,新手也能轻松玩
- 新手恩施游,6天5晚行程详解+旅行必备小贴士助你轻松省钱又避坑
- 中国人游欧洲的四大省钱窍门
- 四川5日游攻略,四川五日游价格?了解攻略=省钱20%
- 潮汕五天四晚行程与美食路线安排和省钱规划,旅行贴士为你服务
- 北京3天2晚旅游预算攻略:费用、行程安排与省钱小贴士
- (转)旅途中一些省钱的小tips
- 重庆5天旅游预算攻略:重庆五日游费用、行程安排与省钱小贴士
热点动态分享
- 2798
- 2674
- 2492
- 2330
- 2187
- 1824
- 1649
- 1495
- 1379
- 1309

