毕业设计:基于机器学习的生活垃圾智能分类系统 多尺度特征融合 轻量型网络
智能垃圾分类系统让环保生活更轻松,垃圾分类知识普及化。 #生活知识# #生活感悟# #科技生活变迁# #生活便利#
目录
前言
课题背景和意义
实现技术思路
一、算法理论基础
1.1 卷积神经网络
1.2 多尺度特征融合
二、 数据集
2.1 数据集
2.2 数据扩充
三、实验及结果分析
3.1 实验环境搭建
3.2 模型训练
最后
前言
大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
对毕设有任何疑问都可以问学长哦!
选题指导:
最新最全计算机专业毕设选题精选推荐汇总
大家好,这里是海浪学长毕设专题,本次分享的课题是
基于机器学习的生活垃圾智能分类系统
课题背景和意义
随着全球城市化进程的加快和人口的不断增长,生活垃圾管理成为一个重要的环境和社会问题。传统的垃圾分类方式存在效率低下和资源浪费的问题,因此,开发一种基于机器学习的生活垃圾智能分类系统具有重要的现实意义。这个系统可以利用图像识别和深度学习技术,自动识别和分类各类生活垃圾,为垃圾处理和资源回收提供科学依据,减少对环境的污染,提高资源利用效率。
实现技术思路
一、算法理论基础
1.1 卷积神经网络卷积神经网络(CNN)是一种前馈神经网络,专门用于高效处理图像数据并自动提取特征信息。它由输入层、卷积层、池化层、全连接层和输出层组成。根据不同的识别任务要求,网络的深度和宽度可以进行调节。在图像分类任务中,RGB图像作为网络的输入,经过卷积和池化等操作提取特征,在训练过程中通过传递参数来调节网络的权重参数,最终将提取到的特征送入全连接层,将特征空间映射到样本标记空间,由分类器输出该图像对应各类别的置信度,完成分类。
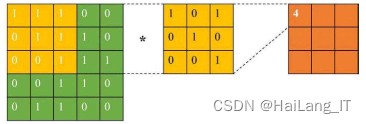
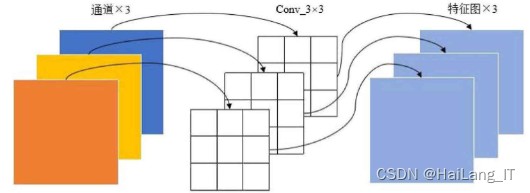
卷积层是由多个不同或相同维度的卷积核构成,用于特征提取。卷积过程是将卷积核在输入特征图上滑动,每滑动到的一个区域都会对该区域的特征图进行卷积运算。滑动的步长可以根据实际需要进行设置,步长不同且不进行补边的情况下,输出特征图的尺寸也不同。一般情况下,在卷积运算中,卷积核的通道数与输入图像的通道数一致。通过对应通道的点积运算,每个卷积核可以产生一张特征图,不同尺度的卷积核对图像特征提取的效果有所不同,因此在不同的场景需求中使用不同的卷积核,并通过权值迭代进行优化。常用的卷积核有标准卷积、深度可分离卷积以及空洞卷积。
深度可分离卷积是源自Xception网络的一种卷积操作,它将完整的卷积运算拆分为深度卷积和点态卷积,以构建跨通道相关性和空间相关性。深度卷积实际上是对每个通道进行独立处理的二维卷积核,而点态卷积是一个跨通道的三维卷积核,其尺寸为1×1。通过这种方式,深度可分离卷积能够增强特征的提取性能。深度可分离卷积是一种将完整卷积运算拆分为深度卷积和点态卷积的操作,用于构建通道相关性和空间相关性。深度卷积是对每个通道进行独立处理的二维卷积核,而点态卷积是跨通道的三维卷积核。这种卷积方式能够提高特征的提取性能。
经过深度卷积运算后,输出特征图的数量与输入通道数量一致。然而,由于深度卷积是对每个通道独立进行处理的,它难以充分发挥在不同通道但位置相同的特征信息上的作用。为了解决这个问题,可以引入点态卷积来将深度卷积运算后得到的特征图进行组合,从而得到新的特征图,并充分利用跨通道相关联信息的作用。

通过点态卷积,可以实现跨通道的信息交互和整合,利用不同通道之间的相关性来提升特征表达的能力。点态卷积使用1×1的卷积核,能够对每个通道的特征进行非线性组合和调整,从而得到具有更丰富表达能力的特征图。这样,深度可分离卷积就能够更好地发挥在不同通道、但位置相同的特征信息上的作用,提高网络的表达能力。
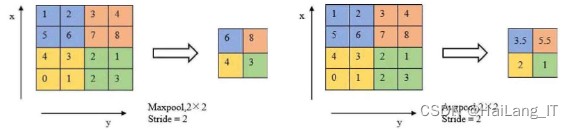
池化层,也称为下采样层,通常在两个卷积层之间使用,其主要作用体现在两个方面:
筛掉部分特征:池化层可以通过筛选特征图的部分特征来减少特征计算量,并降低特征图的维度。
加强特征的不变性:池化操作可以增强特征的不变性。常见的池化操作有最大池化(Max Pooling)和平均池化(Mean Pooling)。最大池化是将整个特征图切割成多个不重叠的同样大小的块状区域,然后在每个小块中找到其最大值并舍弃其他的点。平均池化是对输入特征图进行固定矩形尺度的区域划分,然后计算每个子区域的特征平均值,最终得到新的特征图并输出。
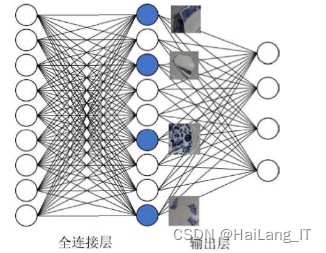
全连接层位于整个分类网络的最后一层,该层中的所有神经元与上一层的神经元进行全连接。特征图输入到全连接层后,特征信息中包含类别区分性的信息会进行非线性组合,并与样本空间进行映射。在分类问题中,如果标记类别有5类,则全连接层将特征图映射为5个输出值。全连接层通过在众多子类信息中找到属于特定类别的重要信息,完成分类任务。
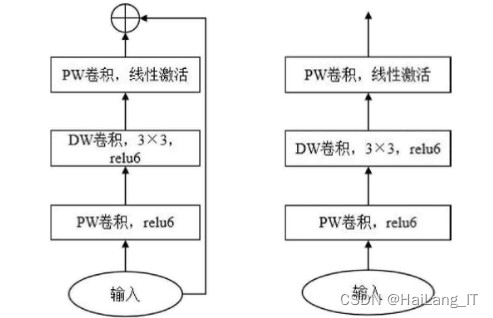
MobileNetV2 是一种专为移动设备和嵌入式设备设计的轻量级卷积神经网络架构。它的主要特性包括使用深度可分离卷积来降低模型的计算开销,采用反向残差结构来加深网络层数和增强特征的表达能力,以及使用线性瓶颈结构来减少低维特征的信息丢失。MobileNetV2对于残差模块相对于原始残差单元进行了改进,引入了逆残差结构和线性瓶颈结构。逆残差结构使用全深度可分离卷积构成,首先通过PW卷积进行特征升维,然后使用3x3的DW卷积提取各通道的特征,最后通过PW卷积进行降维操作。当步长为1时,使用残差连接;当步长为2时,直接使用串联结构。逆残差过程在DW卷积之前引入尽可能多的图像信息,有利于特征提取,同时使网络允许更小的输入与输出,从而降低计算量和参数数量。此外,残差连接可以提高网络性能,避免网络过深导致退化现象。
由于垃圾目标的尺度和特征差异较大,为了精确识别垃圾类别,需要获取丰富的纹理和形状特征信息,并考虑从多尺度特征获取的角度。验证实验证明了替换深度可分离卷积为空洞卷积以及采用通道拼接结构相对于残差连接结构在深度挖掘垃圾特征方面的优越表现,并且该结构可以在不增加参数量的同时明显提升分类准确率。深度拼接DC模块作为基础特征提取模块,并在此基础上进行轻量化改进,借鉴了原始MobileNet V2反向残差结构和非线性瓶颈结构的思想。
DCS模块中的3个3x3卷积分别为空洞率为[1, 2, 3]的空洞卷积,可以有效增加特征提取模块的感受野,并且不引入额外计算量。使用不同空洞率可以制造不同感受野,从而实现对不同尺度垃圾的关注,提升模型的召回率。对拼接后的特征图使用PW卷积进行降维操作,降低后续模块的计算量和模型整体的参数量。DCS模块中的特征升维体现在三个空洞卷积的通道数分别为模块初始输入通道的1、1、2倍,层层实现特征升维进行特征提取,并将输出特征图在通道层面上拼接,实现多尺度特征的有效融合。再使用一个PW卷积进行特征降维,以便后续网络允许更小的输入与输出维度,从而降低网络的计算量和参数量。
为了处理不同尺度和外形变化的垃圾目标,采用了轻量型多尺度特征提取模块和轻量型注意力机制的改进。特征提取模块使用了深度拼接DC模块作为基础,并进行了轻量化的改进。改进后的模块结构包括三个3x3的空洞卷积层,使用不同的空洞率来增加感受野,实现对不同尺度垃圾的关注。随后,使用一个PW卷积进行特征降维操作,降低计算量和参数量。最后,通过通道拼接将特征图在通道层面上融合,实现多尺度特征的提取。
二、 数据集
2.1 数据集由于网络上缺乏现有的合适的数据集,我们决定使用网络爬取的方式自行收集与生活垃圾智能分类相关的数据。我们编写了爬虫程序,从各种在线资源中收集了大量包含不同类别和形式的垃圾图像样本。通过这种方式,我们能够获得真实且多样化的垃圾图像数据,为我们的研究提供更准确、可靠的数据支持。
2.2 数据扩充为了增加数据样本的多样性和数量,我们对收集到的垃圾图像样本进行了数据扩充。采用了图像增强技术和数据合成方法,我们生成了与原始数据具有相似特征但略有变化的新样本。这样做可以增加数据集的规模,并使模型更好地适应各种垃圾形式和场景。
对数据集进行了标注,为每个样本添加了相应的类别标签和注释信息。标注的过程包括对垃圾类型、特征和属性的识别和描述。这样的标注使得数据集更加丰富和可用于模型训练和评估。通过数据扩充和数据标注,我们为基于机器学习的生活垃圾智能分类系统提供了一个具备广泛的样本覆盖和标注详细的数据集。这将有助于提高系统的准确性和鲁棒性,并为进一步的研究和应用奠定基础。
三、实验及结果分析
3.1 实验环境搭建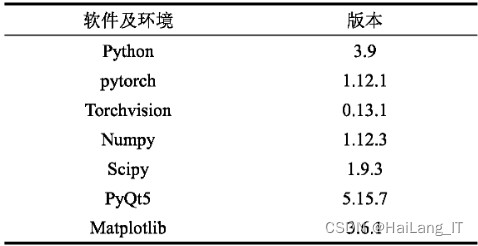
生活垃圾智能分类系统设计思路如下:
数据收集和标注:首先,需要收集大量的生活垃圾数据,并进行标注,将每个样本与其对应的垃圾分类类别进行关联。这可以通过人工标注或者自动化标注技术来完成。数据的多样性和代表性对于训练准确的分类模型至关重要。
特征提取与选择:在数据准备阶段,需要对收集到的生活垃圾数据进行特征提取。特征提取的目标是将原始数据转化为机器学习算法可以处理的数值特征。常用的特征提取方法包括统计特征、频域特征和时间序列特征等。同时,需要进行特征选择,选择最具有区分性和代表性的特征。
模型选择与训练:在设计阶段,需要选择适合生活垃圾分类任务的机器学习模型。常见的模型包括决策树、支持向量机、神经网络和深度学习模型等。选择合适的模型后,使用标注好的数据对模型进行训练,并进行参数调优,以提高分类准确率和性能。
模型评估与优化:完成模型训练后,需要对模型进行评估,以了解其分类性能。评估指标可以包括准确率、精确率、召回率和F1分数等。根据评估结果,可以对模型进行优化,如调整模型参数、增加训练数据量、改进特征提取方法等,以提高分类准确度和鲁棒性。
相关代码示例:
import tensorflow as tf
from tensorflow.keras.layers import Conv2D, MaxPooling2D, Dropout, Flatten, Dense
from tensorflow.keras.models import Sequential
# 构建DCAN-MobileNet模型
def build_dcan_mobilenet_model(input_shape, num_classes):
model = Sequential()
# 第一层卷积
model.add(Conv2D(32, (3, 3), activation='relu', input_shape=input_shape))
model.add(MaxPooling2D((2, 2)))
# 第二层卷积
model.add(Conv2D(64, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
# 第三层卷积
model.add(Conv2D(128, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
# MobileNet部分
model.add(Conv2D(256, (3, 3), activation='relu'))
model.add(Conv2D(256, (3, 3), activation='relu'))
model.add(Conv2D(256, (3, 3), activation='relu'))
model.add(Conv2D(256, (3, 3), activation='relu'))
model.add(Conv2D(256, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
# 全连接层
model.add(Flatten())
model.add(Dense(512, activation='relu'))
model.add(Dropout(0.5))
model.add(Dense(num_classes, activation='softmax'))
return model
# 定义输入形状和类别数
input_shape = (224, 224, 3) # 假设输入图像尺寸为224x224,通道数为3
num_classes = 10 # 假设有10个类别
# 构建DCAN-MobileNet模型
model = build_dcan_mobilenet_model(input_shape, num_classes)
# 打印模型结构
model.summary()
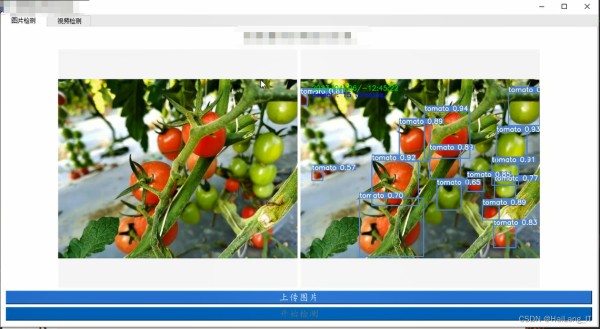
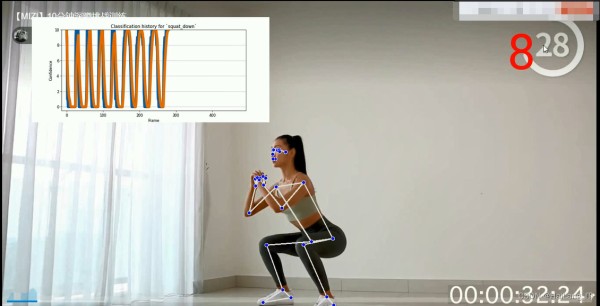
海浪学长项目示例:



最后
我是海浪学长,创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!
网址:毕业设计:基于机器学习的生活垃圾智能分类系统 多尺度特征融合 轻量型网络 https://www.yuejiaxmz.com/news/view/736996
相关内容
毕业设计:基于机器学习的生活垃圾智能分类系统Python基于深度学习机器学习卷积神经网络实现垃圾分类垃圾识别系统(GoogLeNet,Resnet,DenseNet,MobileNet,EfficientNet,Shufflent)
基于机器视觉的垃圾自动分类系统设计
基于STM32的智能垃圾分类系统设计
基于深度学习的生活垃圾检测与分类系统(网页版+YOLOv8/v7/v6/v5代码+训练数据集)
基于机器学习的网络安全防护系统建设.doc
生活垃圾焚烧系统设计(毕业设计).doc
毕业设计:基于深度学习的商品个性化推荐系统
springboot毕设 垃圾分类回收系统的设计与实现程序+论文
基于深度学习的垃圾分类识别系统
随便看看
最新动态分享
- 88VIP:Maryya 美丽雅 53564 塑料软鬃毛扫把簸箕套装 家用客厅清洁神器 37.9元
- 清洗墙面神器品牌排名,你了解多少?看我一一揭秘!
- 享家美 铝合金魔术扫把刮水拖地两用硅胶客厅扫灰卫生间浴室地刮打扫神器 省力软硅胶地刮35cm 29.9元
- 客厅吊灯如何清洗保养
- 云蕾 魔术扫把刮水拖地两用硅胶多功能可伸缩刮水除尘客厅浴室家用神器 45CM款 19.9元
- 厨房用品小百货实用具家居大全家用物件生活创意日用网红清洁神器批发,价格,库存
- 一个人住,如何克服不想打扫房间的惰性?3分钟小习惯解决大问题
- 23元 Kao 花王 日本原装 花王(KAO)客厅清洁剂去除异味 客厅清洁剂 补充装 350ml
- 家居清洁的秘密武器,轻松搞定打扫!
- 清洁神器大揭秘:让家务变得轻松有趣
热点动态分享
- 3087
- 2909
- 2871
- 2588
- 2431
- 1937
- 1680
- 1559
- 1535
- 1359

