智能网联和车路协同有何区别?谁更具优势?
物联网设备的互联互通,让智能家居系统更加智能化和协同化。 #生活知识# #科技生活# #科技改变生活# #物联网技术#
随着自动驾驶技术的不断发展,车路协同(V2X,Vehicle-to-Everything)和智能网联(IoV,Internet of Vehicles)这两个概念逐渐进入公众视野。二者虽然都致力于提升交通效率和安全性,且从名词定义上看,这两个技术很像,很多小伙伴在谈及这两个技术时,也会混淆在一起,但这两个技术核心与发展路径却截然不同,今天智驾最前沿就带大家来厘清这两个概念!

车路协同:路侧单元的信息交互
车路协同(Cooperative Vehicle-Infrastructure System, CVIS)是通过车辆与外部环境的信息交互,达到提升交通效率与安全性的目的。其核心理念是让车辆不再是单一的感知与决策主体,而是依靠与道路基础设施、其他车辆以及行人的协同作用,共享全局信息,优化驾驶决策。这种模式的实现高度依赖于基础设施的部署,包括路侧单元(RSU)、边缘计算节点和通信网络等技术设施。

在车路协同系统中,路侧单元(RSU)作为重要的感知与交互节点,安装在道路两旁或关键路段,负责采集包括交通流量、道路状况和环境信息在内的多种数据,并通过专用短程通信(DSRC)或蜂窝车联网(C-V2X)技术与车辆进行信息交互。这些设备不仅能够弥补车辆自身传感器的盲区,还可以通过实时数据更新为每辆车提供精准的行车信息,譬如出现前方交通拥堵状况、潜在的危险物体以及动态交通信号灯的变更等场景时,车路协同技术可以提前让相关道路上的车辆知晓,并对行驶安排及时做出调整。与单车智能不同的是,这些信息并非局限于车辆周围的环境,而是涵盖了更大范围的道路和交通状况,从而实现全局优化。
通信技术是车路协同系统的核心。传统的DSRC技术依赖Wi-Fi协议,能够实现车辆与RSU之间低延迟、高可靠性的近距离通信,但受限于通信范围,更多适用于短距离信息交互场景。而C-V2X技术作为近年来的技术升级方案,基于4G和5G蜂窝网络,不仅具备更大的覆盖范围和更强的抗干扰能力,还能够支持车辆与云端的实时交互。特别是在5G低时延、高带宽的特性加持下,C-V2X为车路协同提供了坚实的通信保障。
高精度定位与多传感器融合技术也在车路协同中起到关键作用。传统的GNSS(全球导航卫星系统)定位精度通常受限于复杂城市环境的遮挡或多路径干扰,而车路协同通过引入路侧高精度定位设备与地图匹配算法,可以将定位精度提高至厘米级别,从而保证车辆在动态复杂环境中的安全性和决策准确性。这些定位能力不仅服务于车辆,还为行人和非机动车提供精确的位置服务,进一步减少潜在交通事故。
边缘计算与云计算技术也在车路协同中被充分应用。路侧设备可以在本地进行简单计算任务,从而减轻云端的负担,并降低通信延迟。如在高速公路的入口匝道,边缘节点能够实时分析交通流信息,并向进入主路的车辆发送速度建议,减少拥堵和事故风险。而云端则负责全局性的交通优化,通过对城市级交通数据进行深度分析,为道路规划、信号灯控制和应急响应提供决策支持。
车路协同是以基础设施为核心,强调全局信息的共享与协同优化。它不仅能为车辆提供单车感知无法获得的信息,还能通过实时的交通管理提升整个道路网络的运行效率。在自动驾驶系统中,车路协同技术尤其适用于复杂路段、交通流量大的区域以及高风险路况,为高级别自动驾驶(L4/L5)的实现奠定了基础。

智能网联:车联网的信息交互
智能网联(Internet of Vehicles, IoV)是一种以车辆为信息终端,通过车内外信息的采集、传输和处理,提升车辆智能化和联网能力的技术体系。相比于依赖道路基础设施的车路协同,智能网联更加强调单车的自主感知、计算和决策能力,并通过网络实现与外界的信息交互。这种终端导向的模式使得车辆在具备独立感知和计算能力的同时,能够与云端及其他车辆进行信息共享,最终实现更高效、更智能的驾驶体验。
车载终端是智能网联技术的核心,它通常集成多种传感器、通信模块以及高性能计算单元,用于实时感知周围环境并处理包括前方障碍物的位置、交通标志的识别以及道路车道线的检测等复杂数据。通过这些数据,车辆能够构建周围环境的实时数字化模型,从而为自动驾驶或驾驶辅助系统提供支持。车载终端的通信模块可以通过蜂窝网络(如4G、5G)将车辆与外部世界连接,实现车辆与云端、其他车辆以及智能设备的高效信息交互。
通信技术在智能网联中发挥着至关重要的作用。传统的4G通信已经能够满足基本的信息传输需求,而5G的出现为智能网联带来了显著的技术飞跃。5G通信以其低时延、高带宽和大规模设备连接的能力,使得车辆能够在毫秒级的时间内完成信息交换。这对于自动驾驶等对实时性要求极高的应用场景至关重要。如当车辆行驶至复杂交叉口时,5G网络可以将云端的交通流信息、实时导航数据以及红绿灯状态快速下发至车辆,从而帮助其完成更加安全高效的驾驶决策。
大数据与人工智能技术也是智能网联系统的重要支柱。车辆通过车载传感器和终端设备采集海量的驾驶行为、交通流以及环境数据,并将这些数据上传至云端进行分析与建模。基于人工智能算法,云端可以实现对交通状态的精准预测以及驾驶行为的智能优化。如现在手机端的智能导航系统,能够根据实时交通数据动态调整驾驶路线,帮助车辆避开拥堵路段;而驾驶行为分析系统可以为驾驶员提供个性化的安全建议,进一步降低事故风险。这些功能的实现,使得智能网联车辆不仅能够适应复杂的道路环境,还能够为用户提供更加便捷和智能的出行服务。
智能网联技术的实施相对灵活,不需要依赖大规模的道路基础设施改造即可部署。基于现有的蜂窝通信网络和车载终端,车辆能够快速接入智能网联生态系统,从而推动技术的快速普及。这种终端导向的模式也为车辆制造商和技术供应商提供了更大的创新空间,使得智能网联系统可以根据不同用户的需求提供如车载娱乐系统、远程车辆诊断以及自动驾驶辅助功能等定制化的功能与服务。
智能网联是以车为中心,通过车内传感器与云端技术的结合,实现了车辆智能化与联网能力的全面提升。它的终端导向特点,使其在无需大规模基础设施建设的前提下,便能迅速落地并发挥作用。在推动自动驾驶发展的过程中,智能网联以其灵活性与可扩展性成为一项极具潜力的核心技术,为未来的智慧交通系统奠定了重要基础。

技术差异:基础设施依赖与自主能力
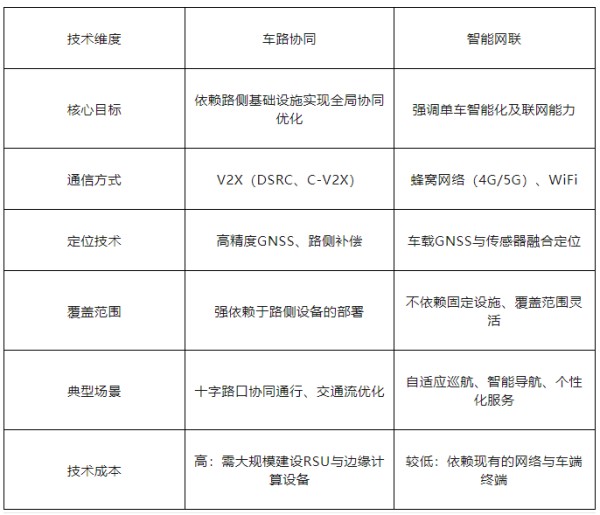
车路协同与智能网联在技术实现上最显著的差异体现在基础设施依赖与自主能力的平衡。车路协同的技术架构高度依赖外部基础设施,尤其是路侧单元(RSU)、通信网络、边缘计算节点和高精度定位设备等,构建了一个车辆与道路环境实时交互的信息共享网络。这种模式将道路环境信息的感知任务部分外包给基础设施,从而弥补了车辆传感器的感知盲区,提高系统的全局感知能力。车路协同的技术优势在提升交通安全性和道路通行效率方面尤为突出,尤其是在大规模部署后,其整体效能更为显著。

与之相比,智能网联则更加依赖单车的自主感知与计算能力,强调车辆作为独立个体在复杂道路环境中的生存与决策能力。通过集成激光雷达、毫米波雷达和高分辨率摄像头等多种传感器,智能网联车辆能够构建全面的环境感知模型。这种高度依赖车载硬件和软件系统的模式,使得智能网联车辆可以在缺乏外部基础设施支持的情况下,依靠自身完成路径规划和动态决策。智能网联车辆通过与云端的连接,获得实时更新的地图数据、交通状况和行车建议,这种云端赋能进一步增强了车辆的自主性。与车路协同相比,这种架构对单车的硬件性能和计算能力提出了更高要求,也使得车辆的成本相应增加。
基础设施依赖的差异也体现在通信技术的选择与应用上。车路协同更倾向于构建一个由RSU主导的区域化通信网络,通过DSRC或C-V2X实现车辆与道路设施的高效通信。这种模式的优点在于通信路径相对固定,延迟较低,适合区域化、高密度的交通信息交互场景。而智能网联则依托蜂窝通信网络(4G/5G),实现车辆与云端及其他车辆的实时信息交互。5G技术的低时延和高带宽特性弥补了传统通信网络的不足,使智能网联车辆能够快速响应动态复杂的环境信息,同时适应更大范围的部署需求,这也意味着智能网联的可靠性在一定程度上依赖于通信网络的覆盖与质量,在一些偏远地区可能面临信号不足的挑战。
定位技术的应用差异进一步体现了两者在基础设施与自主能力之间的技术权衡。车路协同通过在路侧部署高精度定位设备,结合GNSS和差分定位技术,为车辆提供厘米级的精准定位服务。这种方式通过外部设备补偿了车辆自身定位能力的不足,但需要大规模的基础设施投入和成本投入,想要普遍应用仍有很长的一段路要走。而智能网联则更多依赖车载定位系统与多传感器融合算法,如惯性导航系统(INS)与高精地图相结合,在道路标志识别和地图匹配的辅助下实现高精度定位。这种自我感知能力虽然减少了对外部设备的依赖,但对车辆传感器和计算系统的精度要求极高,且在遮挡环境中易受多路径干扰的影响。

谁更具优势?
在探讨车路协同和智能网联谁更具优势时,需要结合技术实现的深度和适用场景进行分析。
车路协同依托道路基础设施的强大感知能力和信息交互网络,使其在提升全局交通效率和安全性方面具有显著优势。在高度复杂的交通环境中,车路协同通过路侧单元(RSU)和边缘计算节点感知宏观的交通流动态,并将全局优化后的信息发送给车辆。特别是在大规模车辆接入的情况下,这种系统能够实现车与车、车与路之间的信息协同,从而降低拥堵和事故的概率。
智能网联的优势在于其高度灵活性和独立性。相比车路协同,智能网联更加注重单车的自主能力,通过集成多种传感器和高性能计算硬件,能够在没有外部基础设施支持的情况下完成感知与决策。对于低基础设施覆盖的地区或需要快速部署的场景,智能网联显然更具适应性。
从技术成熟度和现阶段的可行性来看,智能网联在短期内或许具有一定优势。其依托现有的蜂窝网络,能够快速实现规模化应用,而无需等待道路基础设施的大规模建设。智能网联高度依赖单车的计算性能和传感器精度,这意味着车辆成本较高,且在面对感知盲区或极端天气时可能存在性能瓶颈。车路协同的发展壁垒主要在于成本,想要实现车路协同,需要在路侧加装大量的通信设备,其资金投入和时间投入是非常大的,但一旦建成,能够从系统层面提升交通效率和安全性。特别是在实现L4或L5级自动驾驶的远期目标中,车路协同的全局感知和优化能力将发挥更大的作用。
未来,两种技术模式可能会逐步融合,从而实现优势互补。智能网联以车辆的自主能力为基础,为个体提供精确的感知与决策支持;而车路协同通过基础设施的全局视角,进一步优化道路网络的整体运行效率。在城市交通、高速公路等需要精细化管理的场景中,车路协同可能更具竞争力;而在基础设施建设受限或用户追求成本效益的场景中,智能网联的灵活性和低依赖性使其更具吸引力。因此,车路协同与智能网联的优势并非绝对,而是需要根据具体的技术条件、经济成本和应用需求进行综合权衡。
原文标题 : 智能网联和车路协同有何区别?谁更具优势?
网址:智能网联和车路协同有何区别?谁更具优势? https://www.yuejiaxmz.com/news/view/771409
相关内容
人、车、路等协同互联 智慧交通融入生活解读:能源+互联网和智能电网究竟有什么不同?
智能网联、智慧交通、智慧城市协同发展——腾讯深入智慧交通出行
物联网:连接万物的智能时代,未来之路何在?
智能互联网时代 车载导航与云端在线导航协作
智能生活,让你的车子更聪明──车联网
车路协同技术
车联网时代:未来汽车=智能盒子
节能汽车和新能源汽车有何区别?
新能源汽车在智能化板块相较于燃油汽车优势更明显
随便看看
最新动态分享
- 拥抱大自然:家居绿植养护与美化建议
- 现代家庭居室绿化
- 家居绿化植物养护方法
- 3分钟了解家庭绿化养护的注意事项(苏州绿化养护)
- 家庭绿色养殖技巧
- 家里绿植怎么养
- 搞好家庭绿化应考虑哪些条件
- 少儿科普知识:家庭绿化生活小秘诀
- 家庭绿植的日常养护经典课件
- 做好家庭绿化应考虑哪些条件
热点动态分享
- 3064
- 2906
- 2855
- 2573
- 2388
- 1929
- 1677
- 1549
- 1526
- 1338

