线扫相机技术解析:应用、选型与优势
决策模型1: SWOT分析,评估优势、劣势、机会和威胁 #生活技巧# #领导力技巧# #决策模型#
线扫相机的使用 前言原理产品的应用优势线阵相机如何选型常用参数图片尺寸触发模式帧触发(Frame Burst Start)行触发(Line Start)帧+行触发自由触发模式 频率转换器及编码器控制方向前言
生活中最常见的线扫相机的应用就是复印机上的扫描装置。
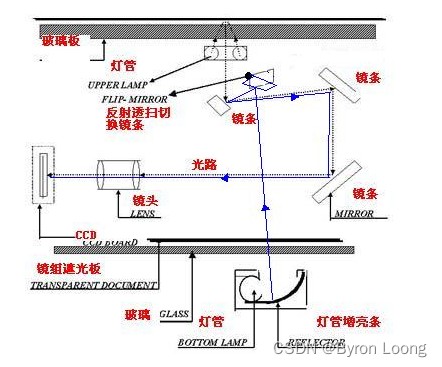
原理
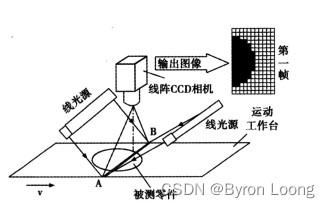
每次采集完一条线后正好运动到下一个单位长度,再继续下一条线的采集,一段时间后线条就拼成了一张二维的图片。
两种方式:
1.匀速运动,相同间隔时间取单帧。
2.编码器触发取图,等间距触发单帧取图。
产品的应用
线阵相机的典型应用领域是检测连续的材料,例如金属、塑料、纸和纤维等。被检测的物体通常匀速运动 , 利用一台或多台相机对其逐行连续扫描 , 以达到对其整个表面均匀检测。可以对其图像一行一行进行处理 , 或者对由多行组成的面阵图像进行处理。另外线阵相机非常适合测量场合,这要归功于传感器的高分辨率 , 它可以准确测量到微米。
线阵相机,顾名思义是呈“线”状的。虽然也是二维图像,但极长,几K的长度,而宽度却只有几个象素的而已。一般上只在两种情况下使用这种相机:一、被测视野为细长的带状,多用于滚筒上检测的问题。二、需要极大的视野或极高的精度。
在第二种情况下(需要极大的视野或极高的精度),就需要用激发装置多次激发相机,进行多次拍照,再将所拍下的多幅“条”形图象,合并成一张巨大的图。因此,用线阵型相机,必须用可以支持线阵型相机的采集卡。
线阵型相机价格贵,而且在大的视野或高的精度检测情况下,其检测速度也慢--一般相机的图象是
400K~1M,而合并后的图象有几个M这么大,速度自然就慢了。
优势
线阵CCD加上扫描机构及位置反馈环节,其成本仍然大大低于同等面积、同等分辨率的面阵CCD;扫描行的坐标由光栅提供,高精度的光栅尺的示值精度可高于面阵CCD像元间距的制造精度,从这个意义上讲,线阵CCD获取的图像在扫描方向上的精度可高于面阵CCD图像;最新的线阵CCD 亚像元的拼接技术可将两个CCD芯片的像元在线阵的排列长度方向上用光学的方法使之相互错位1/2个像元,相当于将第二片CCD的所有像元依次插入第一片CCD的像元间隙中,间接“减小”线阵CCD像元尺寸,提高了CCD的分辨率,缓解了由于受工艺和材料影响而很难减小CCD像元尺寸的难题,在理论上可获得比面阵CCD更高的分辨率和精度。线阵相机如何选型
1.计算分辨率:幅宽/最小检测精度=每行需要的像素
2.选定相机:幅宽/像素数=实际检测精度
3.每秒运动速度长度/精度=每秒扫描行数
如幅宽为1800毫米、精度1毫米、运动速度25000mm/s
相机:1800/1=1800像素,最少2000像素,选定为2k相机1800/2048=0.9实际精度25000mm/0.9mm=27.8KHz应选定相机为2048像素28 KHz相机。
常用参数
图片尺寸高度(Height)和宽度(Width)共同决定一张图的大小。
触发模式 帧触发(Frame Burst Start)相机只有收到帧触发信号,才会开
始曝光并给出图像数据。相机按照
当前设置的行频出图,无需设置行
触发信号。
行频由外部行触发控制信号的频
率决定。该模式下,在一个触发信
号输入时只曝光一行。
相机的外部帧触发信号、行触发信
号都是必 需的。一帧的行数由帧
高度寄存器控制,行频由外部提供
的行触发信号控制,同时受限于内
部的设定值。相机收到帧触发信号
之后,行触发信号才起作用。
该模式的触发信号均由相机内部
自行产生,可以根据需求调节行频
参数。
开启行触发时,当外接了编码器触发信号后,编码器的信号快慢会控制相机的实际行频,
若拍出来的图片略有压缩或拉伸时,需要使用频率转换器来进行控制。
预除器(PreDivider)输入信号最先进入到预除器模块,通过一个整数整除,达到降低
源信号频率的目的, 并将处理后的信号送到乘法器模块。预除器模块可以减少输入信号的
周期性抖动,并且频率超过 100kHz 的信号必须要经过 预除器降低频率,因为乘法器只能
接受 10~100kHz 频率范围内的信号。来自轴编码器的信号的周期性抖动可以被接受。
乘法器(Multiplier)信号被预除器处理完成后会被送到乘法器,乘法器会把信号频率
乘上一个整数,达到 增加信号频率的目的,随后信号会被送到分压器模块。调整参数可以
设置成上升沿或者下降沿。如果设置成上升沿,由预除器过来的信号的 每一个上升沿将会
被锁定去匹配上升沿产生的信号,反之亦然。要确保不要用太大的乘数去增加信号的频率,
避免触发信号频率超出相机的最大支持 行频。即使选择一个较小的乘数,过高的频率也有
可能在频率调整中产生,出现超出 相机最大行频的情况。
分频器(PostDivide) 分频器通过一个整数因子降低信号的频率,并将产生的新的频
率的信号作为相机的触发信号。
经过上述 3 个模块处理后的信号即作为相机的最终触发信号。
较常用的为乘法器和预除器,简单点描述就是:图像拉伸了就使用预除器,压缩就使用
乘法器。
对于有往返的平移台,可以使用轴编码器控制来处理。在相机输入接了两相后,轴编码
器可以选择忽视方向计数(Ignore Direction)和固定方向计数(Follow Direction)两种模
式。忽视方向计数会记录所有方向的数据;固定方向计数只会记录正向一次的数据,反复来
回的数据不予记录。
网址:线扫相机技术解析:应用、选型与优势 https://www.yuejiaxmz.com/news/view/853367
相关内容
全方位解析:AI语音识别技术在多场景应用中的优势与挑战AI智能语音技术详解:功能、应用与未来发展趋势全面解析
AI语音对话技术:全方位解析、应用场景与未来发展趋势
浅析家庭智能清洁机器人的技术发展趋势与现状
全面解析AI智能教育培训:优势、应用、趋势与未来发展前景
二维码的生成与扫描技术深入解析
扫地机器人行业发展环境、技术趋势和终端应用解读
智能机器人在线对话的优势与应用
无线网络优化技术应用及发展
AI语音技术详解:功能、应用及未来发展趋势全面解析
随便看看
最新动态分享
- 远程智控,美的“酷省电”空调,便捷生活一手掌握!
- 一文秒懂变频器节电的原理
- 节电器有用吗?谁说一下?
- 低碳生活,从家电节电的小窍门开始!
- 节电器可省电20%?专家称不靠谱
- 节电器有用吗?有人给我介绍这个,不知道怎么样
- 家用电器能效等级是什么?怎么判断?
- ★天气网★提供全国及世界各大城市天气预报查询以及历史天气查询,实时更新天气,准确提供天气预报一周查询及未来天气预报10天、15天、一个月查询服务。欢迎定制城市天气预报服务。
- 高里掌村股份经济合作社生活区历史天气查询
- 【山东菏泽百花园天气】菏泽百花园景点一周天气查询,7天,10天,15天
热点动态分享
- 2856
- 2772
- 2717
- 2394
- 2227
- 1852
- 1655
- 1502
- 1421
- 1316

