一种履带吸盘式玻璃幕墙清洁机器人及方法
'玻璃清洁机器人': 自动清洁,玻璃光亮如新 #生活技巧# #清洁技巧# #懒人清洁神器#
本发明属于玻璃幕墙清洁机器人,涉及一种履带吸盘式玻璃幕墙清洁机器人及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着当代城市化快速发展,人们在城市建立了越来越多高楼大厦。随着人类消费水平和生活质量不断提高,高层建筑物数量也在快速增长,尤其是玻璃幕墙高层建筑的增长速度极快。由于玻璃幕墙具有优异的视野和采光性能,被广泛应用于各种高层建筑。但是,玻璃幕墙外表面持续暴露在外,受到刮风、雨水、尘埃等自然因素污染,极易形成大面积污渍。这不仅降低建筑美观,还严重影响使用寿命。因此,及时清洗和保养玻璃幕墙刻不容缓。
3、目前市面上采用的玻璃幕墙清洁方式多为通过清洁工人通过固定于楼顶上的绳索进行支撑,以升降平台或者升降吊篮为载体,依靠绳索的支撑自上而下地进行玻璃幕墙的清洁。这种传统的清洗方法虽然简单易行,但其清洁效率极低且工作任务繁重。同时,高空产生的气流会对人员的身体平衡造成极大的影响,使清洁工人难以找寻支撑点。这不仅会对玻璃幕墙造成一定程度的破坏,更严重的是会严重危机人员的自身安全,属于危险作业。为解决这些问题,设计出一款高效、低风险、稳定的玻璃幕墙清洁机器人逐渐成为研发热点。
4、市面上目前已研制成型的玻璃清洁机器人的类型主要包括轮式、脚足式和履带式三种。据发明人了解,这几种机器人都有一定的缺点:轮式玻璃清洁机器人(如专利cn201510526374.1)在三者中清洁效率最高,但机器人的设计致力于提供可靠性高的壁面粘附技术,这是一个非常复杂且艰巨的挑战;脚足式玻璃清洁机器人(如专利cn202210440292.5)对玻璃面的越障能力最强,但其需要具备较高的运算能力和控制算法,才能实现较好的工作效果,生产起来较为复杂繁琐;履带式玻璃清洁机器人(如专利cn201910095167.3)对玻璃面的适应能力最强,清洁效率较高,但其通常只能进行一个方向的移动,实现转向操作通常需要借助绳索或者其他外力来实现,操作相对复杂,如专利cn201911220874.7虽然具备转向系统,但在清洁过程中由于没有设计详细的清洁路线,机器人在转向时的角度仍需依据具体情况来确定,算法设计难度较大。
技术实现思路
1、本发明为了解决上述问题,提出了一种履带吸盘式玻璃幕墙清洁机器人及方法,本发明的吸附能力好、清洁效率高、具有较好的避障能力。
2、根据一些实施例,本发明采用如下技术方案:
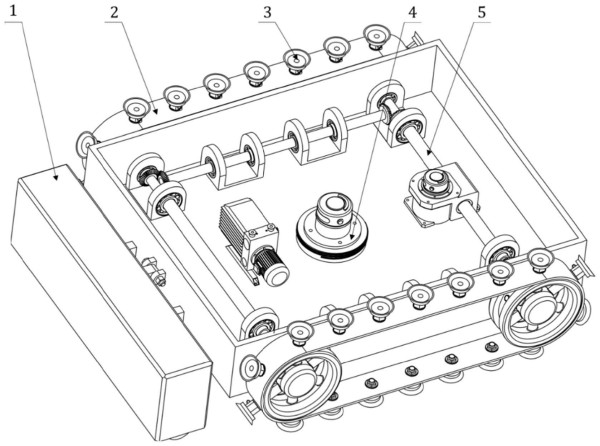
3、一种履带吸盘式玻璃幕墙清洁机器人,包括机器人本体、清洁系统、传动系统、吸附系统、转向系统与驱动系统,其中:
4、所述清洁系统设置于机器人本体前端,传动系统安装于机器人本体两侧,转向系统安装于机器人本体底部,驱动系统安装于机器人本体内部;
5、所述传动系统包括两组,每组均包含履带和履带轮,所述履带设置于机器人本体两侧,每侧履带的两端套接在不同的履带轮上;
6、所述驱动系统包括驱动机构和传动机构,所述驱动机构产生驱动力,通过传动机构传输给传动系统的履带轮上,带动履带移动;
7、所述吸附系统包括多个真空吸盘和真空泵,所述真空吸盘间隔排列于每个履带的表面周围,所述真空泵用于为所述真空吸盘抽真空,以提供吸力;
8、所述转向系统,可从所述机器人本体内旋转伸出或收进,包括小齿轮、大齿轮、电机、固定板和多个真空吸盘,所述电机为转向系统提供动力支撑,将大齿轮、小齿轮均位于固定板上,所述大齿轮位于转向系统轴线中心,所述小齿轮为多个,圆周分布在在同一圆心、同一直径、同一平面的参考圆处,各个小齿轮分度圆与大齿轮的分度圆相切,所述真空吸盘设置于固定板下端,且围绕转向系统轴线中心圆周分布;
9、所述真空泵在同一时刻,仅作用于吸附系统的若干真空吸盘或转向系统的真空吸盘,实现转向系统悬空、吸附系统的真空吸盘吸附于玻璃壁面,以进行清洗作业,或转向系统的真空吸盘吸附于玻璃壁面,吸附系统的真空吸盘分离玻璃壁面,以进行机器人本体转向作业。
10、作为可选择的实施方式,所述清洁系统包括套筒、清洁滚刷、雾化喷嘴与清洁水箱,所述套筒连接于机器人本体上,所述清洁滚刷安装与套筒处,使清洁滚刷与履带处真空吸盘的底部平行,从而使清洁滚刷与待清洁的玻璃壁面直接接触,所述清洁水箱安装在套筒处,清洁水箱内部两端装有玻璃清洁剂,中间装有滚刷清洁剂,三部分之间设有隔层进行分离,雾化喷嘴设置于清洁水箱侧面。
11、作为进一步的,所述雾化喷嘴包括2n+1个,n为大于1的整数,其中2n个雾化喷嘴对称安装于清洁水箱的两端,用于喷洒玻璃清洁剂,另外一个雾化喷嘴安装于清洁水箱中心处,用于喷洒滚刷清洁剂。
12、作为进一步的,所述雾化喷嘴清洁滚刷的刷毛材质选用pbt丝,所述滚筒采用的材质为橡胶,使雾化喷嘴清洁滚刷固定于橡胶层的表面;当清洁机器人从玻璃下端清洁至上端时清洁滚刷的转速小于机器人的行走速率,当机器人从玻璃上端清洁至下端时清洁滚刷的转速大于机器人的行走速率。
13、作为可选择的实施方式,所述吸附系统的真空吸盘上设置有放气阀,当真空吸盘传递至履带轮边缘位置时,真空吸盘上端的放气阀会与履带轮的通气接口相连接,真空吸盘的放气阀打通,履带轮通气接口连接位于履带其他处的真空吸盘,使其取消真空状态。
14、作为进一步的,所述真空吸盘的直径根据吸盘的承载能力、吸盘的安全系数、吸盘真空度和机器人整体重量确定,需要满足当真空吸盘个数在极限情况下能够承担机器人整体重量。
15、作为可选择的实施方式,所述真空泵通过连接管与真空吸盘连接,每个真空吸盘通过连接管并联为一个整体,汇总于一节点后接入真空泵的吸气口。
16、作为可选择的实施方式,所述转向系统的真空吸盘的直径,根据吸盘的承载能力、吸盘的安全系数、真空吸盘个数、吸盘真空度和机器人整体重量确定。
17、作为进一步的,所述小齿轮有三个,以120°的间隔均匀排布在同一圆心、同一直径、同一平面的参考圆处,且三个小齿轮与大齿轮同时进行啮合运动,转向系统的各个真空吸盘真空吸盘同时吸附于玻璃壁面。
18、作为可选择的实施方式,所述驱动系统包括轴承、支撑机座、锥齿轮、轴、减速器和电机,电机用于将动力传递于减速器,减速器通过轴将动力传递于与轴相连的锥齿轮,锥齿轮和锥齿轮连接,将动力传递给另一个轴,轴通过轴承设置于支撑机座上,两个轴同时转动,共同带动履带轮的转动,进而使履带进行转动,通过履带上的真空吸盘的吸附力驱动机器人直接运动。
19、一种上述履带吸盘式玻璃幕墙清洁机器人的工作方法,包括以下步骤:
20、确定机器人转向系统每次工作时的坐标,使机器人运动至坐标位置时,转向系统带动机器人整体的旋转,以保证机器人完成下个路径的任务;
21、将机器人本体安装在要清洗的玻璃幕墙表面上,履带轮转动,机器人通过吸附系统的真空吸盘吸附于玻璃壁面,转向系统悬空,进行清洗作业;
22、根据预先设置的参数进行清洗工作,直到运行至转向坐标位置,在所述坐标位置,机器人控制转向系统伸出,转向系统的真空吸盘吸附于玻璃壁面,吸附系统的真空吸盘分离玻璃壁面,进行机器人本体转向作业;
23、通过不断的清洗作业和转向作业的往复循环,完成整个待清洗区域的清洁任务。
24、作为可选择的实施方式,还包括根据预设玻璃幕墙的面积、机器人清洗的轨迹宽度,选择机器人的起始位置,使得机器人的终止位置位于玻璃幕墙的下端。
25、与现有技术相比,本发明的有益效果为:
26、本发明在在机器人的吸附系统中创新性的设计转向系统,当机器人运动于玻璃幕墙的边界位置时,通过转向系统的运行,实现机器人完成90°转角的转向。转向工作完成后,机器人变为工作状态,继续根据预设的清洁路径继续进行清洁任务。转向系统实现了履带机器人的转向功能,解决了传统履带机器人无法转向的难题,为履带机器人的应用领域提供了一种新的思路。这一设计赋予了机器人更灵活的运动能力,使其能够适应复杂的玻璃幕墙表面,从而提高清洁效率。
27、本发明采用吸附效率相对最高的真空吸附方式,同时选择履带式传动的方式,将真空吸盘固定于同步带并连接于真空泵,使玻璃清洁机器人能够在玻璃幕墙表面稳定进行竖直方向的自由运动。避免了传统爬壁机器人需要依靠固定于楼顶的绳索装置进行稳定、安全的工作,消除了安装绳索装置的工作量,使机器人的工作效率大幅提升。
28、本发明机器人的清洁系统中使用清洁滚刷与雾化喷嘴结合的方式,同时设有滚刷清洁系统,待机器人工作一段时间后,负责滚刷清洁的雾化喷嘴及时向滚刷喷洒滚刷清洁剂。防止滚刷由于清洁过程增加污染影响玻璃清洁度,保证了清洁过程中的效率。
29、本发明通过吸附系统和转向系统的配合,履带轮转动,机器人通过吸附系统的真空吸盘吸附于玻璃壁面,转向系统悬空,进行清洗作业;根据预先设置的参数进行清洗工作,直到运行至转向坐标位置,在所述坐标位置,机器人控制转向系统伸出,转向系统的真空吸盘吸附于玻璃壁面,吸附系统的真空吸盘分离玻璃壁面,进行机器人本体转向作业;通过不断的清洗作业和转向作业的往复循环,完成整个待清洗区域的清洁任务,能够实现根据不同待清洗壁面情况自主切换作业状态,保证清洗任务的全自动进行,提高了清洗效率。
30、本发明还提供了一种作业方法,根据待清洗区域设计清洗路线,确定机器人运动路径,转向系统按照清洁路径仅需进行90°的旋转,减少算法的难度,提高了机器人的效率,降低了成本。
31、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
网址:一种履带吸盘式玻璃幕墙清洁机器人及方法 https://www.yuejiaxmz.com/news/view/140043
相关内容
一种玻璃幕墙自动清洗机器人的制作方法清洗高空外墙及玻璃幕墙的常用方法.doc
【玻璃幕墙保洁工具
弧形玻璃清洁机器人
一种高效玻璃清洁装置的制作方法
玻璃清洁剂使用方法及范围.docx
玻璃清洁剂哪个牌子好,玻璃清洁剂使用方法,玻璃清洁剂招商/批发/加盟
玻璃清洁剂怎么用 玻璃清洁剂的使用方法
玻璃清洁剂使用范围及方法
玻璃清洁剂的用途及使用方法
随便看看
最新动态分享
- 【旧书街】
- 旧书铺的午后时光
- 齐如山 ‖ 北平杂忆:旧书铺 茶馆子
- 聂晓军 高玲:常德有哪些旧书店?
- 中国甘肃网:冯骥才谈“城市要有旧书市场”
- 【寻“常”巷陌】在旧书店感受时光流转
- 常德晚报
- 从“文学山房”到“文育山房”
- 北平旧书铺
- 雅舍忆旧
热点动态分享
- 2848
- 2718
- 2704
- 2374
- 2221
- 1848
- 1654
- 1501
- 1409
- 1315

