基于PID算法的房间温度控制及Python程序
学习Python的推荐顺序是:入门-基础语法-数据结构和算法-框架与库 #生活技巧# #工作学习技巧# #编程语言学习路径#
房间温度模糊PID控制研究
PID算法的基础知识
VAV 空调系统
VAV 空调系统主要由新风管、回风管、送风管等风管系统,空气处理及输送系统,压力传感器、变频器、温湿度传感器等自动控制系统,以及变风量末端装置等部件组成。其中,末端装置是本系统中十分重要的组成部分。房间温控器与变风量末端控制器共同构成串级自动控制回路,主控量为室内温度,辅控量为气流量。
首先,变风量末端控制器通过无线传感器网络采集房间温度,与设定的温度比较得出偏差,输出风量调整信号,调节风阀开度以改变送风量,保持室内温度在设定值附近。同时,通过风管内的压力传感器检测管道压力变化,通过变频器调整送风机转速,消除管道压力的波动对实际送风量的影响。因此,末端装置是变风量空调系统的关键设备之一。其基本构成图,如图 2.1 所示。

综上所述,中央空调主要通过变风量末端装置来实现室内温度调节,而风阀又是末端装置中控制空调房间温度的关键环节。因此,本文旨在基于嵌入式系统和无线传感器网络,选用合适的控制策略,提出便捷的监控方式,设计一套高效智能的 VAV 空调系统末端控制器,实现对变风量空调系统末端装置的风阀高效控制。
VAV 系统末端控制器总体设计方案
中央空调末端控制器是中央空调系统热交换的最后一个环节,更是中央空调系统中最重要的装置之一。特别是对变风量空调系统而言,其对空调系统节能有重要意义。此外,无线、多点的数据采集方式可提高空调房间环境表征的灵活性和准确性,对于保持空调房间舒适度也有十分重要的意义。因此,设计一个能灵活、准确地表征空间环境特征,并在不同送风条件和负荷下达到节能、高效控制效果的末端控制器,是节能和保持舒适度的关键。结合现有 VAV 系统末端控制器结构,本文设计的 VAV系统末端控制器结构示意图,如图 3.1 所示。
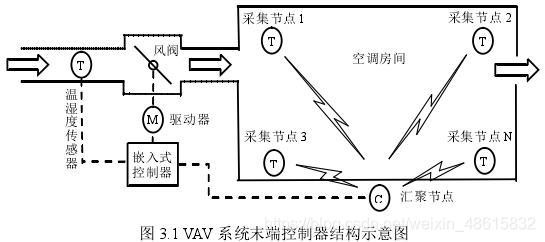
上图借助 Tiny OS 系统组建无线传感器网络,在嵌入式系统硬件平台上实现模糊 PID 控制策略,设计了一种基于无线传感器网络,并结合嵌入式系统和模糊 PID控制策略的 VAV 中央空调末端控制器。该控制器可对网络覆盖区域内多点进行无线实时检测,替代以往单点、有线的数据采集方式,提高系统数据采集的灵活性和环境信息表征的准确性;基于 ARM9 处理器以及 Linux 嵌入式操作系统,替代以往低端裸机,提高系统数据处理能力和控制效率;采用模糊 PID 控制策略,实现了智能控制策略在硬件系统平台上的应用,改善了控制器的实际控制效果;基于 TCP/IP 协议,应用 Wi-Fi无线网络和智能手机 APP,改进以往显示屏和按键,提高了空调房间温湿度显示与设定的便捷性。
VAV 系统模糊 PID 控制策略
虽然常规 PID 控制使用可靠,结构简单,控制精度高,但其 PID 参数难以在线调整,难以控制强时变、非线性等复杂工业过程。此外,当外部环境改变时,其抗干扰能力差,不能自动调整其参数。而模糊控制恰巧可以解决具有非线性、不确定性等复杂系统的控制问题。
VAV 空调系统有着时变性、非线性、大滞后、对象模型不精准等特点,因此用传统的 PID 很难达到很好的控制效果。若在常规 PID 的基础上采用模糊控制自动调整 PID 参数,则可使其不断适应外部环境的变化。
因此,将模糊控制与 PID 控制相结合构成模糊 PID 控制策略,其既具有模糊控制能够解决非线性、不确定性和有较强鲁棒性的优点,又延续了传统 PID 其较高的控制精度。采用模糊 PID 控制策略可以很好的克服上述缺陷,提高抗干扰能力和响应速度。模糊 PID 控制系统结构图,如图 4.2 所示。

上图中的模糊控制器选用二维控制器,以室内温度与设定温度的偏差 e 及其变化率ec 作输入,乘以各自的量化因子后进行模糊化处理,输出为 PID 控制器比例因子、积分与微分时间的变化量,用于调整控制器的 P、I、D 三个参量,最终在线校正得到三个参数Kp ,Ki,Kd。随后 PID 控制器采用增量式的离散算法,得到控制量的值。
VAV 系统模糊 PID 输入输出变量的模糊化设计
由于模糊控制算法本身变量是模糊量,而模糊控制器的输入、输出都要求是精确量。因此,需将 VAV 空调系统中的偏差 e 及偏差变化率 ec 精确量进行模糊化处理:一方面,是模糊的划分,主要确定论域中模糊量的个数;另一方面,是确定隶属度函数,主要是选择合适的隶属度函数。这样,便可以在模糊量和精确量之间随意转换。
VAV 系统模糊规则和推理算法设计
VAV 系统嵌入式末端控制器的输出控制量主要由 PID 控制的kp 、ki 、kd 三个参数决定,而 PID 的这三个参数是由模糊控制的模糊规则在线整定的。因此,模糊规则设计的好坏与否直接影响末端控制器的控制性能。
kp 用于提高精度,加快响应速度;ki 用于消除稳态误差;kd 用于改善动态特性。故对同 e 和 ec,被控过程对pk 、ik 、dk 的自整定应符合如下规律:

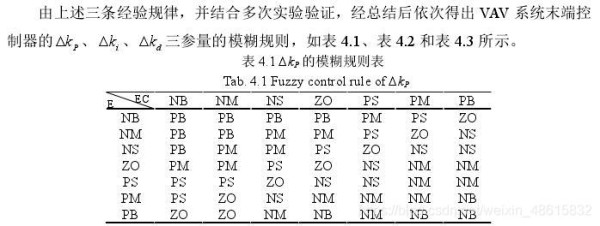

将模糊变量 E、EC 分为 7 个等级,模糊子集均取为:{NB,NM,NS,ZO,PS,PM,PB},对应的语言描述分别为:负大、负中、负小、零、正小、正中、正大。
上述已经制定了模糊控制的模糊规则,输入系统的精确量可以转换为对应的模糊集合。接着,需要精确化输出的控制量。模糊推理的过程实际就是根据已知条件,按照给出的模糊规则表求解控制输出量的过程。而对于 VAV 空调温度控制系统来说,按照表 4.1、4.2 和 4.3 给出的控制规则,推导出△kp 、△ki 和△kd 就是模糊推理的过程。

PID算法Python代码
位置式PID算法
PID的Python实现
#位置式PID import matplotlib.pyplot as plt class PID(): def __init__(self, dt, max, min, Kp, Ki, Kd): self.dt = dt # 循环时长 self.max = max # 操作变量最大值 self.min = min # 操作变量最小值 self.Kp = Kp # 比例增益 self.Ki = Ki # 微分增益 self.Kd = Kd # 积分增益 self.integral = 0 # 直到上一次的误差值 self.pre_error = 0 # 上一次的误差值 def calculate(self, setPoint, pv): # 其中 pv:process value 即过程值, error = setPoint - pv # 误差(设定值与实际值的差值) Pout = self.Kp * error # 比例项 Kp * e(t) self.integral += error * self.dt #∑e(t)*△t Iout = self.Ki * self.integral # 积分项 Ki * ∑e(t)*△t derivative = (error - self.pre_error) / self.dt #(e(t)-e(t-1))/△t Dout = self.Kd * derivative # 微分项 Kd * (e(t)-e(t-1))/△t output = Pout + Iout + Dout # 新的目标值 位置式PID:u(t) = Kp*e(t) + Ki * ∑e(t)*△t + Kd * (e(t)-e(t-1))/△t if (output > self.max): output = self.max elif (output < self.min): output = self.min self.pre_error = error # 保存本次误差,以供下次计算 e(k-1) = e(k) return output t = range(160) pid = PID(0.1, 100, -100, 0.1, 0.5, 0.01) val = 0 setpoint = 15 z = [] for i in t: inc = pid.calculate(setpoint, val) #新的目标值 print("val:%f inc:%f" % (val, inc)) z.append(val) val += inc #设置绘图风格 plt.style.use('ggplot') plt.figure(figsize=(8, 6), dpi=80) plt.plot(t, z, color="blue", linewidth=1.0, linestyle="-") plt.xlabel('time (s)') plt.ylabel('PID (PV)') plt.show() 123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051'
结果:
val:0.000000 inc:3.750000 val:3.750000 inc:2.062500 val:5.812500 inc:2.484375 val:8.296875 inc:2.528906 val:10.825781 inc:2.480273 val:13.306055 inc:2.321807 val:15.627861 inc:2.074080 val:17.701941 inc:1.756347 val:19.458288 inc:1.389571 val:20.847860 inc:0.994899 val:21.842758 inc:0.592738 val:22.435497 inc:0.201906 val:22.637402 inc:-0.161072 val:22.476331 inc:-0.482483 val:21.993847 inc:-0.751786 val:21.242061 inc:-0.961780 val:20.280281 inc:-1.108617 val:19.171664 inc:-1.191655 val:17.980009 inc:-1.213186 val:16.766823 inc:-1.178055 val:15.588768 inc:-1.093201 val:14.495566 inc:-0.967145 val:13.528421 inc:-0.809457 val:12.718964 inc:-0.630228 val:12.088736 inc:-0.439565 val:11.649171 inc:-0.247134 val:11.402037 inc:-0.061765 val:11.340272 inc:0.108861 val:11.449133 inc:0.258456 val:11.707588 inc:0.382271 val:12.089859 inc:0.477169 val:12.567029 inc:0.541611 val:13.108640 inc:0.575574 val:13.684214 inc:0.580410 val:14.264624 inc:0.558654 val:14.823277 inc:0.513800 val:15.337078 inc:0.450052 val:15.787129 inc:0.372065 val:16.159194 inc:0.284697 val:16.443892 inc:0.192770 val:16.636661 inc:0.100853 val:16.737514 inc:0.013083 val:16.750597 inc:-0.066978 val:16.683619 inc:-0.136455 val:16.547164 inc:-0.193220 val:16.353944 inc:-0.235919 val:16.118025 inc:-0.263958 val:15.854067 inc:-0.277462 val:15.576605 inc:-0.277196 val:15.299410 inc:-0.264473 val:15.034937 inc:-0.241045 val:14.793892 inc:-0.208978 val:14.584914 inc:-0.170532 val:14.414382 inc:-0.128043 val:14.286339 inc:-0.083804 val:14.202534 inc:-0.039975 val:14.162560 inc:0.001512 val:14.164072 inc:0.039009 val:14.203080 inc:0.071204 val:14.274284 inc:0.097150 val:14.371434 inc:0.116269 val:14.487703 inc:0.128345 val:14.616047 inc:0.133500 val:14.749548 inc:0.132157 val:14.881705 inc:0.124991 val:15.006695 inc:0.112873 val:15.119569 inc:0.096819 val:15.216388 inc:0.077923 val:15.294312 inc:0.057305 val:15.351617 inc:0.036056 val:15.387672 inc:0.015191 val:15.402864 inc:-0.004385 val:15.398479 inc:-0.021912 val:15.376567 inc:-0.036797 val:15.339770 inc:-0.048617 val:15.291153 inc:-0.057131 val:15.234022 inc:-0.062268 val:15.171754 inc:-0.064115 val:15.107639 inc:-0.062901 val:15.044739 inc:-0.058969 val:14.985770 inc:-0.052754 val:14.933016 inc:-0.044751 val:14.888265 inc:-0.035489 val:14.852776 inc:-0.025505 val:14.827271 inc:-0.015317 val:14.811954 inc:-0.005402 val:14.806553 inc:0.003819 val:14.810372 inc:0.011997 val:14.822369 inc:0.018861 val:14.841230 inc:0.024227 val:14.865457 inc:0.027995 val:14.893452 inc:0.030146 val:14.923598 inc:0.030736 val:14.954334 inc:0.029887 val:14.984221 inc:0.027772 val:15.011993 inc:0.024607 val:15.036600 inc:0.020633 val:15.057233 inc:0.016105 val:15.073338 inc:0.011280 val:15.084618 inc:0.006404 val:15.091022 inc:0.001700 val:15.092722 inc:-0.002636 val:15.090087 inc:-0.006443 val:15.083644 inc:-0.009600 val:15.074044 inc:-0.012026 val:15.062017 inc:-0.013682 val:15.048335 inc:-0.014565 val:15.033770 inc:-0.014709 val:15.019062 inc:-0.014177 val:15.004885 inc:-0.013056 val:14.991829 inc:-0.011454 val:14.980374 inc:-0.009488 val:14.970887 inc:-0.007280 val:14.963607 inc:-0.004953 val:14.958654 inc:-0.002623 val:14.956030 inc:-0.000395 val:14.955635 inc:0.001640 val:14.957275 inc:0.003408 val:14.960683 inc:0.004857 val:14.965540 inc:0.005949 val:14.971489 inc:0.006670 val:14.978159 inc:0.007023 val:14.985183 inc:0.007027 val:14.992209 inc:0.006713 val:14.998923 inc:0.006127 val:15.005050 inc:0.005320 val:15.010370 inc:0.004351 val:15.014721 inc:0.003276 val:15.017997 inc:0.002156 val:15.020153 inc:0.001045 val:15.021199 inc:-0.000008 val:15.021190 inc:-0.000962 val:15.020229 inc:-0.001782 val:15.018447 inc:-0.002444 val:15.016003 inc:-0.002933 val:15.013070 inc:-0.003245 val:15.009826 inc:-0.003380 val:15.006445 inc:-0.003351 val:15.003094 inc:-0.003173 val:14.999921 inc:-0.002870 val:14.997051 inc:-0.002466 val:14.994585 inc:-0.001989 val:14.992596 inc:-0.001468 val:14.991129 inc:-0.000929 val:14.990199 inc:-0.000400 val:14.989799 inc:0.000097 val:14.989896 inc:0.000543 val:14.990439 inc:0.000922 val:14.991361 inc:0.001224 val:14.992585 inc:0.001442 val:14.994027 inc:0.001575 val:14.995601 inc:0.001624 val:14.997225 inc:0.001595 val:14.998820 inc:0.001498 val:15.000318 inc:0.001342 val:15.001660 inc:0.001140 val:15.002800 inc:0.000906 val:15.003706 inc:0.000654 val:15.004360 inc:0.000396 val:15.004755 inc:0.000144 123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141142143144145146147148149150151152153154155156157158159160

增量式PID算法
PID算法之增量式控制温度
#增量式PID import matplotlib.pyplot as plt class PID(): def __init__(self, dt, max, min, Kp, Ki, Kd): self.dt = dt # 循环时长 self.max = max # 操作变量最大值 self.min = min # 操作变量最小值 self.Kp = Kp # 比例增益 self.Ki = Ki # 微分增益 self.Kd = Kd # 积分增益 self.error = 0 # 当前误差 self.error_1 = 0 #上次误差 self.error_2 = 0 # 上上次误差 self.pre_output = 0 #上次的输出值 def calculate(self, setPoint, pv): # 其中 pv:process value 即过程值, error = setPoint - pv # 误差(设定值与实际值的差值) Pout = self.Kp * (error - self.error_1) # 比例项 Kp * (e(t)-e(t-1)) Iout = self.Ki * error # 积分项 Ki * e(t) Dout = self.Kd * (error - 2*self.error_1 + self.error_2) # 微分项 Kd * (e(t)-2*e(t-1)+e(t-2)) output = Pout + Iout + Dout + self.pre_output # 新的目标值 位置式PID:u(t) = Kp*(e(t)-e(t-1)) + Ki*e(t) + Kd*(e(t)-2*e(t-1)+e(t-2)) + u(t-1 if (output > self.max): output = self.max elif (output < self.min): output = self.min self.pre_output = output self.error_2 = self.error_1 #e(k-2) = e(k) ,进入下一次计算使用 self.error_1 = error # e(k-1) = e(k) return output t = range(100) pid = PID(0.1, 100, -100, 0.2, 0.5, 0.05) val = 0 setpoint = 15 z = [] for i in t: inc = pid.calculate(setpoint, val) #新的目标值 print("val:%f inc:%f" % (val, inc)) z.append(val) val += inc #设置绘图风格 plt.style.use('ggplot') plt.figure(figsize=(8, 6), dpi=80) plt.plot(t, z, color="blue", linewidth=1.0, linestyle="-") plt.xlabel('time (s)') plt.ylabel('PID (PV)') plt.show() 12345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152'
结果:
val:0.000000 inc:11.250000 val:11.250000 inc:9.562500 val:20.812500 inc:4.828125 val:25.640625 inc:-1.221094 val:24.419531 inc:-5.384180 val:19.035352 inc:-6.116865 val:12.918486 inc:-3.816101 val:9.102385 inc:-0.219112 val:8.883274 inc:2.703224 val:11.586498 inc:3.723214 val:15.309712 inc:2.772716 val:18.082427 inc:0.724484 val:18.806911 inc:-1.221457 val:17.585454 inc:-2.172596 val:15.412859 inc:-1.896949 val:13.515910 inc:-0.789296 val:12.726613 inc:0.449874 val:13.176487 inc:1.209697 val:14.386184 inc:1.236674 val:15.622858 inc:0.676561 val:16.299420 inc:-0.080455 val:16.218965 inc:-0.635996 val:15.582969 inc:-0.772504 val:14.810465 inc:-0.516410 val:14.294055 inc:-0.072960 val:14.221094 inc:0.308912 val:14.530006 inc:0.463033 val:14.993039 inc:0.366201 val:15.359240 inc:0.118182 val:15.477422 inc:-0.131764 val:15.345658 inc:-0.265743 val:15.079915 inc:-0.245853 val:14.834062 inc:-0.114708 val:14.719354 inc:0.041999 val:14.761354 inc:0.145087 val:14.906441 inc:0.157695 val:15.064136 inc:0.093458 val:15.157594 inc:-0.000819 val:15.156775 inc:-0.074329 val:15.082446 inc:-0.097010 val:14.985436 inc:-0.069192 val:14.916244 inc:-0.014866 val:14.901377 inc:0.034702 val:14.936079 inc:0.057244 val:14.993323 inc:0.048006 val:15.041329 inc:0.018202 val:15.059532 inc:-0.013714 val:15.045818 inc:-0.032284 val:15.013534 inc:-0.031666 val:14.981868 inc:-0.016298 val:14.965571 inc:0.003408 val:14.968979 inc:0.017252 val:14.986231 inc:0.019994 val:15.006225 inc:0.012746 val:15.018970 inc:0.001074 val:15.020044 inc:-0.008579 val:15.011465 inc:-0.012113 val:14.999351 inc:-0.009190 val:14.990162 inc:-0.002579 val:14.987583 inc:0.003815 val:14.991398 inc:0.007033 val:14.998431 inc:0.006250 val:15.004681 inc:0.002699 val:15.007380 inc:-0.001354 val:15.006026 inc:-0.003893 val:15.002133 inc:-0.004054 val:14.998079 inc:-0.002275 val:14.995804 inc:0.000189 val:14.995993 inc:0.002032 val:14.998025 inc:0.002521 val:15.000546 inc:0.001719 val:15.002265 inc:0.000283 val:15.002548 inc:-0.000976 val:15.001572 inc:-0.001504 val:15.000069 inc:-0.001211 val:14.998858 inc:-0.000412 val:14.998445 inc:0.000408 val:14.998853 inc:0.000859 val:14.999712 inc:0.000808 val:15.000520 inc:0.000389 val:15.000909 inc:-0.000122 val:15.000787 inc:-0.000466 val:15.000321 inc:-0.000516 val:14.999805 inc:-0.000313 val:14.999492 inc:-0.000007 val:14.999486 inc:0.000237 val:14.999722 inc:0.000316 val:15.000038 inc:0.000230 val:15.000268 inc:0.000054 val:15.000322 inc:-0.000109 val:15.000213 inc:-0.000186 val:15.000028 inc:-0.000158 1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465666768697071727374757677787980818283848586878889909192

PID参数调节口诀:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
网址:基于PID算法的房间温度控制及Python程序 https://www.yuejiaxmz.com/news/view/434598
相关内容
基于STM32的家庭温湿度控制系统的设计深入浅出PID算法
智慧园区室内温度控制方法与流程
基于单片机的温控报警系统设计 (电路+程序+论文)
基于python+flask框架的校园旧物交易系统(开题+程序+论文) 计算机毕设
电热锅炉温度控制系统专业交流论坛
智能家居系统的人工智能控制方法研究
django基于Python的校园生活助手系统(程序+开题)
控制技术
海林自控申请基于半实物仿真的智能建筑温度控制专利,提高空调系统的稳定性、能效性和舒适性
随便看看
最新动态分享
- 随园食单(精装版)袁枚著 系统论述中国烹饪技术和南北菜点的重要著作 厨师入门基础知识书 中式家常菜美食生活饮食文化菜谱书籍 24.5元
- 7日瘦身食谱,超简单7日瘦身食谱书籍
- 满足电视还可以收纳书籍,这样客厅不浪费
- 正版包邮 意大利面焗烤比萨一本就够 披萨食谱生活美食披萨制作书怎么样做披萨书家常菜菜谱大全烹饪食谱图解烘焙入门书籍
- 正版包邮 百姓爱吃的家常菜 中医养生方大全 手把手教 家常炒菜的大全书 零基础学做本味全家都爱吃的百姓家常菜 生活烹饪食谱书籍
- 永续美好生活:享受四季欢愉的持家料理术 《永续美好生活》 坂井顺子 家事生活美学系列 日式家庭料理食谱生活百科书籍 家常菜谱料理书
- 疯狂万圣节,跟奶茶店大佬们如何做节日促销!
- 越来越多人小卧室不放“床”了!学学年轻人的做法
- 2018 年 10月 随笔档案
- 老人得了褥疮怎么办,老人得了褥疮用褥疮消
热点动态分享
- 2688
- 2598
- 2238
- 2183
- 2137
- 1743
- 1637
- 1488
- 1300
- 1296

