清洁机器人的制作方法
如何清理自动清洁机器人滤网的常见方法 #生活技巧# #居家生活技巧# #懒人生活技巧# #自动清洁机器人#
1.本技术属于家用智能设备技术领域,具体涉及一种清洁机器人。
背景技术:
2.家用智能设备在人们的生活中发挥着越来越重要的作用。由此,越来越多的家用智能设备出现在人们的生活中。其中,清洁机器人是较为常见的一种家用智能设备。
3.在具体的工作过程中,随着清洁机器人的行进,清洁机器人逐步完成清洁作业。我们知道,清洁机器人清洁需要清洁机器人在地面上行进。但是,在较多的情况下,清洁机器人在行进的过程中会与环境中的物体发生碰撞,最终较容易导致清洁机器人发生损坏,基于此,相关技术涉及的清洁机器人虽然配置有防撞传感器,但是无法较好地避免清洁机器人发生撞击。
技术实现要素:
4.本技术实施例的目的是提供一种清洁机器人,能够解决相关技术中,虽然清洁机器人配置有防撞传感器,但仍然无法较好地避免清洁机器人发生撞击的问题。
5.为了解决上述技术问题,本技术是这样实现的:
6.本技术实施例提供一种清洁机器人,包括基座、雷达罩、雷达、传感器支架、多个侧方防撞传感器和两个上方防撞传感器,其中:
7.所述雷达固定在所述基座上,所述雷达罩活动地连接于所述基座上,且罩设在所述雷达上;
8.所述两个上方防撞传感器分别设于所述传感器支架的前侧边缘和所述传感器支架的后侧边缘,所述上方防撞传感器的感应面朝向所述清洁机器人的上方,所述多个侧方防撞传感器间隔地设于所述传感器支架的两个侧方边缘,所述侧方防撞传感器的感应面朝向所述清洁机器人的侧方;
9.所述雷达罩具有第一触发面和第二触发面,所述第一触发面与所述上方防撞传感器的感应面一一相对设置,所述第二触发面与所述侧方防撞传感器的感应面一一相对设置;
10.所述雷达罩与所述基座之间设置有多个第一弹性件,所述雷达罩可随所述多个第一弹性件在第一方向的伸缩而升降,所述雷达罩可在第一平面内侧移,所述第一平面与所述第一方向相垂直。
11.在本技术实施例中,通过在传感器支架上设置多个上方防撞传感器以及多个侧方防撞传感器,使得清洁机器人能够在上方的多个方位以及侧方的多个方位进行障碍物检测,从而使得清洁机器人能够在多个方位避开障碍物,避免清洁机器人与用户室内的物体发生撞击,进而更好地保护清洁机器人以及用户室内的物体,当然也能避免清洁机器人受损。由此可见,本技术能够解决相关技术中,虽然清洁机器人配置有防撞传感器,但仍然无法较好地避免清洁机器人发生撞击的问题。
附图说明
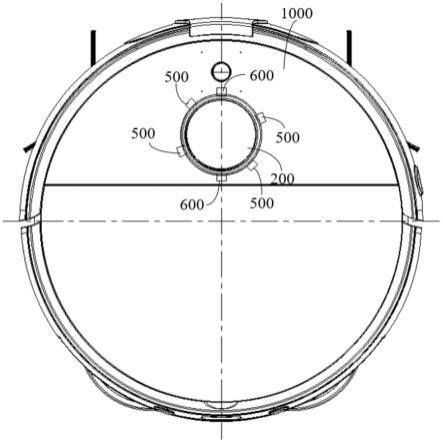
12.图1为本技术实施例公开的清洁机器人的俯视图(图1仅仅示意侧方防撞传感器和上方防撞传感器的分布关系,在实际的结构中,侧方防撞传感器和上方防撞传感器可能处于隐藏状态);
13.图2为本技术实施例公开的清洁机器人的立体图;
14.图3为本技术实施例公开的清洁机器人在拆除装饰面板以及雷达罩的情况下的结构示意图;
15.图4为图3的a处放大图;
16.图5为本技术实施例公开的一种角度下的雷达罩的结构示意图;
17.图6为本技术实施例公开的另一种角度下的雷达罩的结构示意图;
18.图7为本技术实施例公开的清洁机器人在拆除装饰面板的情况下的结构示意图;
19.图8为图7的b处放大图;
20.图9为本技术实施例公开的清洁机器人的爆炸图。
21.附图标记说明:
22.100-基座、110-第一限位面、120-限位筋、130-第一间隙、140-螺纹连接孔、
23.200-雷达罩、210-第一触发面、220-第二触发面、230-第一定位柱、240-片状凸缘、250-第二定位柱、260-第二限位面、270-侧向镂空孔、280-凸筋、200a-罩体部分、200b-触发部分、
24.300-雷达、
25.400-传感器支架、
26.500-侧方防撞传感器、
27.600-上方防撞传感器、
28.700-第一弹性件、
29.800-第二弹性件、
30.900-泡棉件、
31.1000-装饰面板、1010-避让孔、
32.1100-螺纹连接件、
33.1200-雷达支架。
具体实施方式
34.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
35.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
36.下面结合附图,通过具体的实施例及其应用场景对本技术实施例进行详细地说明。
37.如图1至图9所示,本技术公开一种清洁机器人,清洁机器人可以是扫地机器人,清洁机器人包括基座100、雷达罩200、雷达300、传感器支架400、多个侧方防撞传感器500和两个上方防撞传感器600。
38.雷达300固定在基座100上,可有利于清洁机器人的避障,雷达罩200活动地连接于基座100,且罩设在雷达300上,起到保护雷达300的作用。可选的,雷达300可以通过螺钉固定设于雷达支架1200,雷达支架1200可以通过螺钉固定设于基座100。
39.传感器支架400固定在基座100上,两个上方防撞传感器600分别设于传感器支架400的前侧边缘和传感器支架400的后侧边缘,上方防撞传感器600的感应面朝向清洁机器人的上方。多个侧方防撞传感器500间隔地设于传感器支架400的两个侧方边缘,侧方边缘指的是前侧边缘与后侧边缘之间的部分,侧方防撞传感器500的感应面朝向清洁机器人的侧方。可选的,传感器支架400可以为线路板(printed circuit board),上方防撞传感器600和侧方防撞传感器500可以与线路板电连接,使得传感器支架400既能够为上方防撞传感器600和侧方防撞传感器500提供安装基础,又能够为上方防撞传感器600和侧方防撞传感器500供电。上方防撞传感器600和侧方防撞传感器500可以均为避障传感器。
40.雷达罩200具有第一触发面210和第二触发面220,第一触发面210与上方防撞传感器600的感应面一一相对设置,第二触发面220与侧方防撞传感器500的感应面一一相对设置。
41.在清洁机器人行进的过程中,当雷达罩200受到上方障碍物的挤压时,雷达罩200向下移动,雷达罩200的第一触发面210与上方防撞传感器600的感应面接触,使得上方防撞传感器600被触发,上方防撞传感器600被触发后,能够使得清洁机器人停止在被触发的方向上的移动,从而使得清洁机器人避开障碍物。
42.两个上方防撞传感器600分别位于传感器支架400的前侧边缘和后侧边缘,使得清洁机器人在受到上方各个位置的挤压时,均能够触发上方防撞传感器600,避免在只有一个上方防撞传感器600、且雷达罩200被挤压的位置与上方防撞传感器600之间的距离较远的情况下,上方防撞传感器600不能及时检测到上方具有障碍物,导致清洁机器人继续移动而造成清洁机器人受到撞击的问题。
43.在清洁机器人行进的过程中,当雷达罩200受到侧方障碍物的挤压时,雷达罩200在侧方移动,雷达罩200的第二触发面220与侧方防撞传感器500的感应面接触,使得侧方防撞传感器500被触发,侧方防撞传感器500被触发后,能够使得清洁机器人停止在被触发的方向上的移动,从而使得清洁机器人避开障碍物。
44.多个侧方防撞传感器500间隔地设于传感器支架400的两个侧方边缘,使得清洁机器人在受到侧方各个位置的挤压时,均能够触发侧方防撞传感器500,使得清洁机器人能够更灵敏地避开清洁机器人侧方多个方位的障碍物。
45.雷达罩200与基座100之间设置有多个第一弹性件700,雷达罩200可随多个第一弹性件700在第一方向的伸缩而升降。第一方向可以为竖直方向,在雷达罩200顶部受到上方障碍物挤压时,第一弹性件700被压缩产生形变,当雷达罩200顶部的挤压力消失时,上方防
撞传感器600自身复位带动雷达罩200向初始位置的方向移动,第一弹性件700恢复形变也能够带动雷达罩200恢复至初始位置,实现雷达罩200的复位。
46.雷达罩200可在第一平面内侧移,第一平面与第一方向相垂直。在雷达罩200侧部受到侧方障碍物挤压时,第一弹性件700会在雷达罩200的带动下弯曲,使得第一弹性件700产生形变,当雷达罩200侧部的挤压力消失时,侧方防撞传感器500自身复位带动雷达罩200向初始位置的方向移动,第一弹性件700由弯曲状态恢复至原始状态,也能够带动雷达罩200恢复至初始位置,实现雷达罩200的复位。
47.在此结构中,雷达罩200受到障碍物的挤压导致雷达罩200的位置发生改变,在雷达罩200受到的外力消失后,对应的上方防撞传感器600或侧方防撞传感器500可通过自身的复位功能以及第一弹性件700的复位功能带动雷达罩200复位,避免雷达罩200无法复位导致其中一个或多个防撞传感器始终处于被触发状态。
48.在本技术实施例中,通过在传感器支架400上设置多个上方防撞传感器600以及多个侧方防撞传感器500,使得清洁机器人能够在上方的多个方位以及侧方的多个方位进行障碍物检测,从而使得清洁机器人能够在更多个方位上避开障碍物,避免清洁机器人与用户室内的物体发生撞击,进而更好地保护清洁机器人以及用户室内的物体,提升用户的使用体验。由此可见,本技术能够解决相关技术中,虽然清洁机器人配置有防撞传感器,但仍然无法较好地避免清洁机器人发生撞击的问题。
49.在一种可选的实施例中,第一弹性件700的一端可以粘接于基座100,另一端可以粘接于雷达罩200,使得第一弹性件700固定连接于基座100和雷达罩200。
50.在一种可选的实施例中,基座100和雷达罩200中,一者可以开设有第一定位槽,另一者可以设有第一定位柱230,第一弹性件700可以为第一伸缩弹簧,第一伸缩弹簧的第一端可以定位于第一定位槽之内,第一伸缩弹簧的第二端可以套设于第一定位柱230上。第一定位槽可以开设于基座100,第一定位柱230可以设于雷达罩200,为了减轻雷达罩200的重量,第一定位柱230可以设为空心结构。第一弹性件700也可以是弹性柱或其他具有弹性的结构件,本技术对此不作限制。第一弹性件700的数量可以为3个,沿雷达罩200的周向间隔设置,当然,第一弹性件700的数量可以根据需求进行调整,本技术对此不作限制。
51.此种情况下,通过第一定位槽和第一定位柱230能够实现第一弹性件700的装配,结构简单、操作便捷、装配稳定性高,且便于雷达罩200和第一弹性件700的拆装,便于后续对雷达罩200和第一弹性件700的检修和更换。
52.基座100可以开设有凹槽,传感器支架400与凹槽的侧壁之间形成第一间隙130,雷达罩200具有多个片状凸缘240,多个片状凸缘240均伸至第一间隙130中,第一间隙130的开口朝向清洁机器人的上方,片状凸缘240的朝向传感器支架400的内侧表面为第二触发面220,多个片状凸缘240与多个侧方防撞传感器500一一相对,第二触发面220与侧方防撞传感器500的感应面相对,以确保侧方防撞传感器500能够顺利被触发。第一触发面210可以与第二触发面220相垂直。
53.此种情况下,雷达罩200的至少部分位于基座100的凹槽内,能够降低雷达罩200的高度,进而降低清洁机器人整体的高度。相比于雷达罩200位于第一间隙130内的部分为闭环的环状结构的技术方案,本技术中的多个片状凸缘240间隔设置的技术方案还能够减轻雷达罩200的重量,以增强雷达罩200移动的灵敏性,进而增强清洁机器人障碍物检测的灵
敏性。
54.片状凸缘240伸入第一间隙130内,在片状凸缘240与凹槽的槽壁接触时,能够阻止雷达罩200继续移动,进而避免雷达罩200在侧向过度移动而导致压坏侧方防撞传感器500。
55.例如,在雷达罩200移动触发位于左前方的侧方防撞传感器500时,左前方的侧方防撞传感器500变形收缩,雷达罩200朝向与右后方的侧方防撞传感器500对应的槽壁的方向移动,随着雷达罩200的持续移动,左前方的侧方防撞传感器500持续变形收缩,直至左前方的侧方防撞传感器500收缩至最小尺寸时,右后方的侧方防撞传感器500对应的片状凸缘240与槽壁接触,阻止雷达罩200继续移动,进而防止左前方的侧方防撞传感器500被压坏。片状凸缘240与凹槽的槽壁配合保护其他侧方防撞传感器500的原理与保护左前方的侧方防撞传感器500的原理相同,在此就不再赘述了。
56.本技术可以通过侧方防撞传感器500的自身复位功能以及第一弹性件700的复位功能来实现雷达罩200的侧向复位,在进一步的技术方案中,雷达罩200与基座100之间可以设置有多个第二弹性件800,多个第二弹性件800与侧方防撞传感器500一一对应,雷达罩200可随第二弹性件800的伸缩在第一平面内侧移,第一平面与第一方向相垂直,第二弹性件800在第一平面内伸缩。
57.在雷达罩200侧移后,相应的第二弹性件800被压缩产生形变,在雷达罩200侧部所受到的挤压力消失后,对应的第二弹性件800恢复形变,并带动雷达罩200复位。此种情况下,第二弹性件800作为专门的侧向复位器件,能够辅助雷达罩200侧移后的复位,提高雷达罩200侧移后的复位效果。
58.在一种可选的实施例中,第二弹性件800的一端可以粘接于基座100,另一端可以粘接于雷达罩200,使得第二弹性件800固定连接于基座100和雷达罩200。
59.在一种可选的实施例中,片状凸缘240的外侧表面与凹槽的侧壁中,一者可以开设有第二定位槽,另一者可以设有第二定位柱250,第二弹性件800可以为第二伸缩弹簧,第二伸缩弹簧的第一端可以定位于第二定位槽之内,第二伸缩弹簧的第二端可以套设于第二定位柱250上。第二定位槽可以开设于凹槽的侧壁上,第二定位柱250可以设于片状凸缘240上,且位于片状凸缘240的背离传感器支架400的一侧。第二弹性件800也可以是弹性柱或其他具有弹性的结构件,本技术对此不作限制。
60.此种情况下,通过第二定位槽和第二定位柱250实现第二弹性件800的装配,结构简单、操作便捷、装配稳定性高,且便于雷达罩200和第二弹性件800的拆装,便于后续对雷达罩200和第二弹性件800的检修和更换。
61.此外,第二定位槽开设于凹槽的侧壁,能够充分地利用凹槽的空间,也有利于第二定位槽和第二定位柱250的下沉,使得清洁机器人的结构更加紧凑。
62.为了避免雷达罩200过度下降而压坏上方防撞传感器600,基座100可以设有第一限位面110,雷达罩200可以设有第二限位面260,第一限位面110与第二限位面260可以在雷达罩200的下降方向限位配合,第一触发面210凸出于第一限位面110,以保证上方防撞传感器600能够被顺利触发,在第一触发面210触发相对应的上方防撞传感器600的感应面,且上方防撞传感器600收缩到最小尺寸的情况下,第一限位面110与第二限位面260接触。第一限位面110和第二限位面260的数量可以为4个,当然,第一限位面110和第二限位面260的数量可以根据需求进行调整,本技术对此不作限制。
63.在雷达罩200顶部受挤压时,雷达罩200向下移动与上方防撞传感器600接触,上方防撞传感器600被触发,上方防撞传感器600被触发时会变形收缩,随着雷达罩200的持续移动,上方防撞传感器600持续收缩,直至上方防撞传感器600收缩至最小尺寸时,第一限位面110与第二限位面260接触,阻止上方防撞传感器600继续下降,进而避免雷达罩200过度下降而压坏上方防撞传感器600。
64.为了避免雷达罩200过度侧移而压坏侧方防撞传感器500,在本技术实施例中,基座100可以设有限位筋120,雷达罩200可以设有第三限位面,限位筋120与第三限位面在雷达罩200的侧向移动方向限位配合,在第二触发面220触发对应的侧方防撞传感器500的感应面,且侧方防撞传感器500收缩到最小尺寸的情况下,限位筋120与第三限位面接触,阻止雷达罩200继续移动,进而避免雷达罩200过度侧移而压坏侧方防撞传感器500。
65.由上文可知,雷达罩200可以设有片状凸缘240,片状凸缘240可以伸入第一间隙130内,凹槽的侧壁可以开设有第二定位槽,基于此,限位筋120可以设于第二定位槽的槽壁,并向靠近片状凸缘240的方向凸出于凹槽的槽壁,第三限位面可以是片状凸缘240的面向第二定位槽的表面。
66.为了实现雷达罩200与基座100的活动相连,基座100可以开设有多个螺纹连接孔140,雷达罩200可以开设有多个穿孔,多个穿孔与多个螺纹连接孔140一一相对,雷达罩200可以通过多个螺纹连接件1100与基座100相连,每个螺纹连接件1100穿过相对应的穿孔,且与螺纹连接孔140相连,穿孔与螺纹连接件1100的杆部在第一方向导向配合,且雷达罩200能够沿螺纹连接件1100的杆部移动,使得雷达罩200能够进行第一方向的移动,螺纹连接件1100的帽体与穿孔的端口所在的表面防脱配合,螺纹连接件1100的杆部与穿孔的孔壁之间具有第二间隙,使得雷达罩200能够进行侧向移动。
67.此种情况下,即能够实现雷达罩200与基座100地活动连接,又能够避免雷达罩200从基座100上脱落。
68.清洁机器人还包括泡棉件900,泡棉件900设置于雷达罩200与传感器支架400之间,且围绕雷达300设置,泡棉件900与雷达罩200弹性接触,且泡棉件900与传感器支架400相连。此种情况下,泡棉件900具有弹性,在雷达罩200向下移动或者侧向移动时,泡棉件900受压变形,在雷达罩200受到的外部作用力消失时,泡棉件900自身恢复形变的过程中还能够带动雷达罩200移动,进而辅助雷达罩200复位。
69.具体的,雷达罩200可以包括罩体部分200a和触发部分200b,触发部分200b固定连接于罩体部分200a的底部,且围绕罩体部分200a设置,罩体部分200a的内壁设有凸筋280,在雷达罩200设于基座100的情况下,凸筋280的底面搭载于泡棉件900的顶部,罩体部分200a的内壁围绕泡棉件900、且与泡棉件900相贴合。
70.在雷达罩200向下移动时,凸筋280的底面挤压泡棉件900,使泡棉件900变形,在雷达罩200受到的向下的外力消失时,泡棉件900恢复形变并通过凸筋280的底面带动雷达罩200复位,在雷达罩200侧向移动时,罩体部分200a的内壁挤压泡棉件900,使泡棉件900变形,在雷达罩200受到的侧向的外力消失后,泡棉件900恢复形变并通过罩体部分200a的内壁带动雷达罩200复位。
71.第一触发面210和第二触发面220均设于触发部分200b,且上文中所提到的第一定位柱230、片状凸缘240、第二定位柱250、第二限位面260均设于触发部分200b。下文中所提
到的侧向镂空孔270可以设于罩体部分200a。
72.在进一步的技术方案中,清洁机器人还包括装饰面板1000,装饰面板1000固定于基座100上,装饰面板1000开设有避让孔1010,雷达罩200设于避让孔1010中,且凸出于装饰面板1000,雷达罩200开设有侧向镂空孔270,泡棉填充于避让孔1010内,且遮挡至少部分侧向镂空孔270。
73.此种情况下,装饰面板1000能够遮盖基座100,避免基座100上的电路板以及电子器件外露,雷达罩200的侧向镂空孔270能够供雷达300收发信号,避免雷达罩200被封闭于清洁机器人内部导致雷达300收发信号不灵敏的问题,泡棉件900遮挡部分侧向镂空孔270,能够在一定程度上防止基座100上的电路板等部件通过侧向镂空孔270露出,进而提升清洁机器人的美观性。
74.传感器支架400可以为圆盘状结构,侧方防撞传感器500为可以四个,上方防撞传感器600可以为两个,每个侧方边缘均设有两个侧方防撞传感器500,相邻的两个侧方防撞传感器500或相邻的侧方防撞传感器500与上方防撞传感器600之间的夹角可以为60
°
。当然,传感器支架400也可以为其他形状,相邻防撞传感器之间的夹角也可以根据具体需求进行调整。
75.此种情况下,能够较为均衡地利用传感器支架400的安装空间,使得多个上方防撞传感器600以及多个侧方防撞传感器500能够均衡地安装在传感器支架400上。同时,此种角度的设置方式使得四个侧方防撞传感器500尽可能地实现四个方向的侧方防撞检测,进而兼顾均衡布置及较大范围内的侧方检测。
76.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
网址:清洁机器人的制作方法 https://www.yuejiaxmz.com/news/view/506195
相关内容
多功能清洁机器人的制作方法一种多功能智能清洁机器人装置的制作方法
清洁方法及清洁机器人技术
一种娱乐水环境多功能清洁机器人的制作方法
多功能扫地机器人的制作方法
机器人制作开源方案
一种家庭安全防护机器人的制作方法
一种桌面清洁器的制作方法
一种玻璃幕墙自动清洗机器人的制作方法
沿边清洁方法、清洁机器人和存储介质技术
随便看看
最新动态分享
- 自制厨房用品
- 怎么自制迷你厨房用具
- 厨房实用工具
- MAXCOOK 美厨 MCDD
- 佳茉 茉辅食工具组合套装6件套带收纳座不锈钢打蛋器厨房剪开瓶器 36.9元
- COOKER KING 炊大皇 揉面垫加厚食品级硅胶面板擀面垫和面垫厨房用品家用烘焙和面垫板 30元
- COOKER KING 炊大皇 手动多功能料理机搅切菜器家用切辣椒蒜泥压蒜器绞菜机厨房拉蒜器 35.9元
- Doulton 道尔顿 英国净水器家用直饮DIP301台下型零耗能活性炭厨房水龙头过滤器 3098元
- newair 维艾 煤气灶支架燃气灶架托厨房灶台防滑炒锅锅架置物通用炉灶架子 炒锅防滑锅架 27.9元
- 居家家 隔热锅帽厨房印花防烫三角护手汤锅铁锅手柄耐高温加厚手套 5.5元
热点动态分享
- 514
- 403
- 358
- 334
- 330
- 310
- 266
- 252
- 236
- 196

