
机器之心报道
编辑:杜伟、大盘鸡
可以想象,不断进化的双臂机器人未来将最大程度地「解放」人的双手。2023 年,斯坦福大学等机构推出了一个用于双机械手远程操作的低成本开源硬件系统 ALOHA,它可以远程操作并完成组装链条、托举乒乓球等复杂、丰富的任务。
今年 1 月,谷歌 DeepMind 与斯坦福又联合推出了 Mobile ALOHA,同样可以进行远程操作并模仿双手操作,通过移动底座在大的空间范围内实现远程操作。这样一来,备菜、翻炒、出锅,洗衣、逗猫、浇花它是样样精通,名副其实的家务机器人火出了圈。

今天,谷歌 DeepMind 联合斯坦福推出了 ALOHA 的增强版本 ——ALOHA 2。与一代相比,ALOHA 2 具有更强的性能、人体工程学设计和稳健性,且成本还不到 20 万元人民币。
并且,为了加速大规模双手操作的研究,ALOHA 2 相关的所有硬件设计全部开源了,并提供了详细的教程,以及具有系统识别功能的 ALOHA 2 MuJoCo 模型。

谷歌 DeepMind 放出了相关论文《ALOHA 2: An Enhanced Low-Cost Hardware for Bimanual Teleoperation》。

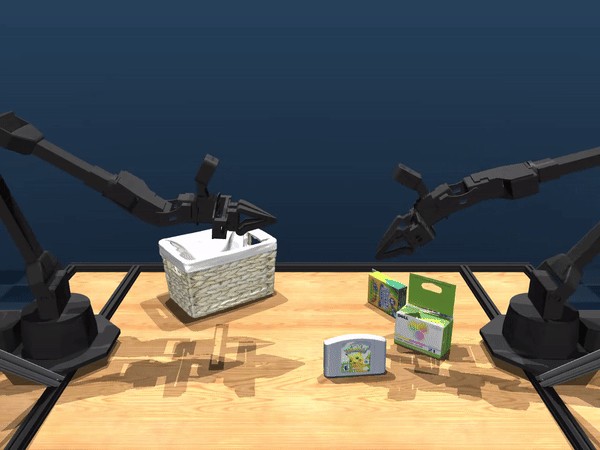
我们先来一睹升级后的 ALOHA 2 能做些什么,比如将不同的玩具放进三个不同的碗里。

玩杂耍,你扔我接。

开可乐瓶并将可乐倒进别的杯子里、开酸奶盒。


给熊猫玩偶戴上美瞳。

更难以想象的是,它还能变身扒手,悄无声息拿走你的钱包,并给你放回去。

简直绝了!ALOHA 2 显著提高了一代 ALOHA 的耐用性,从而能够在更复杂的任务上进行大规模数据收集。
相较于一代,ALOHA 2 都升级了些啥
为支持对复杂操作任务的研究,在 ALOHA 平台上扩大数据收集的规模成为目标之一,包括使用的机器人数量、每台机器人的数据收集小时数以及数据收集的多样性。这一扩展过程改变了相对于第一代 ALOHA 平台的要求和范围。
对于 ALOHA 2,除了在 ALOHA 平台的基础上建设,研究者还针对以下领域寻求进一步改进:
根据上述目标,ALOHA 2 的具体改进如下:
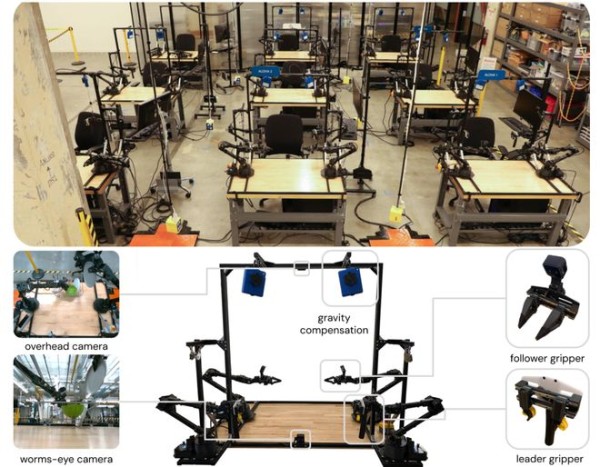
夹持器
为了使遥控操作更顺畅,并改善人体工程学,本次采用了低摩擦轨道设计,降低了机械复杂性,从而取代了 ALOHA 原有的剪刀导轨式机械手设计。
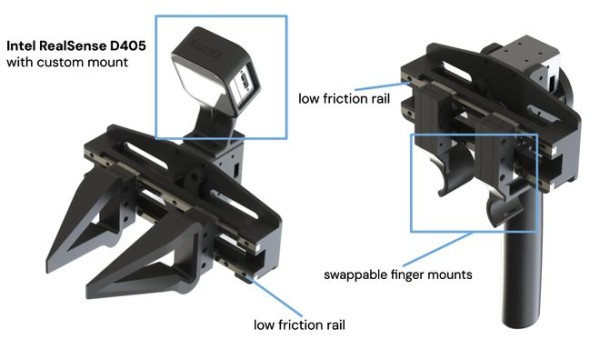
研究者设计并制造了低摩擦随动机械手,取代了 ALOHA 最初的设计。较低的摩擦减少了领导机器人和跟随机器人夹持器之间感知的延迟,显著改善了远程操作期间的用户体验。
框架
研究者重新设计了支撑框架,并使用 20x20mm 铝型材将其制成。框架为领导机器人和重力补偿系统提供支撑,并为俯视摄像机和虫眼摄像机提供安装点。

与 ALOHA 相比,本次设计进行了简化,去掉了工作台与遥控操作员相对一侧的垂直框架。增加的空间使数据收集方式更加多样化。例如,人类协作者可以更轻松地站在工作区的对面与机器人互动,从而收集人机互动数据。此外,还可以在工作台前摆放较大的道具,让机器人与之互动。
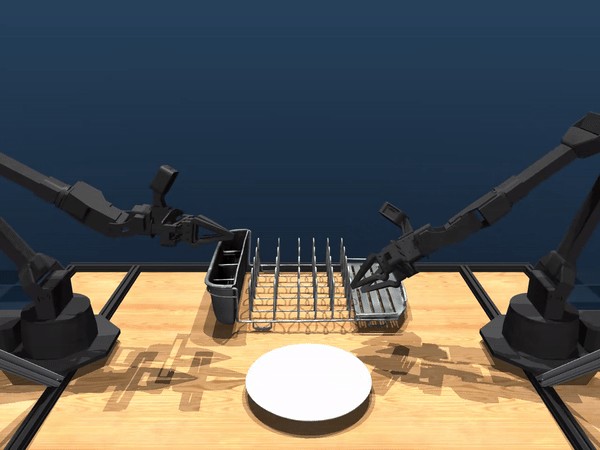
模拟
研究者发布了用于 ALOHA 2 工作单元的 MuJoCo Menagerie 模型,它对于远程操作和模拟学习非常有用。
与之前发布的 ALOHA 模型相比,MuJoCo 的物理精度更高、视觉保真度更高,允许快速、直观、可扩展的模拟数据收集。
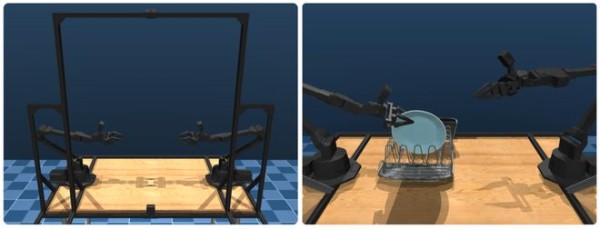
MuJoCo 模型渲染。
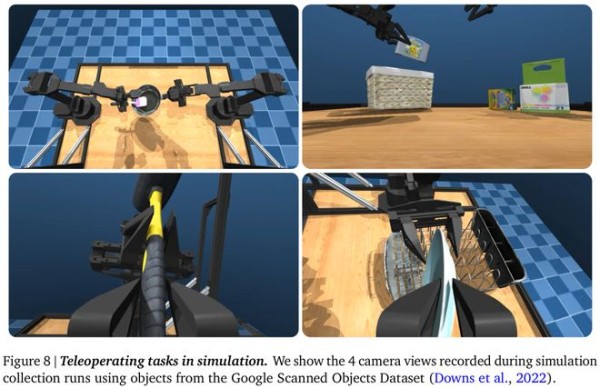
模拟远程操作任务。
以下为使用 Google Scanned Objects Dataset 与 MuJoCo 模型进行远程操作的示例(1 倍速度):


更多细节内容请参阅原论文。
第三步,改分词,is 变成分词是being,所以最后变成Such being the case, you should apologize to her.就变成了独立主格斯坦福最强家务机器人ALOHA 2来了,联手谷歌DeepMind,完全开源看别人其实看到的是自己,说别人其实是在说自己,所有看和说无不体现着审美主体的个人意识人

