目标:灰尘检测
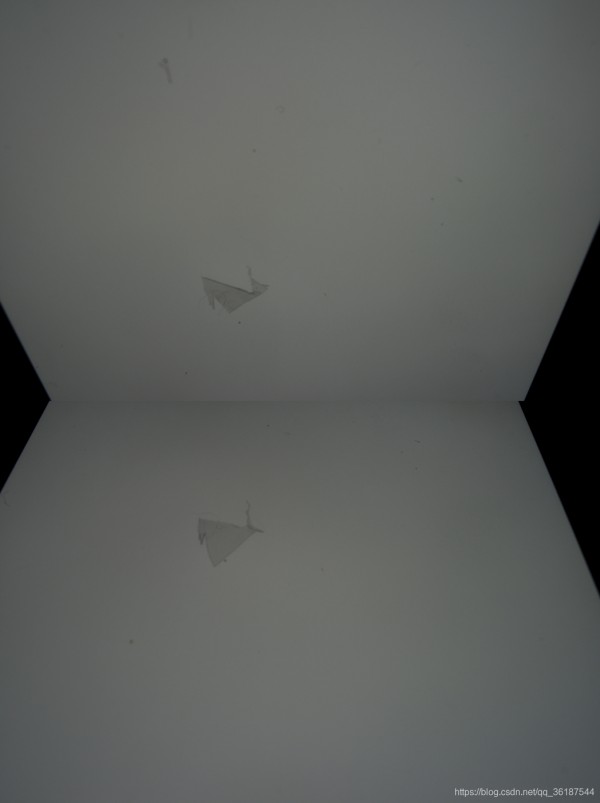
原图:
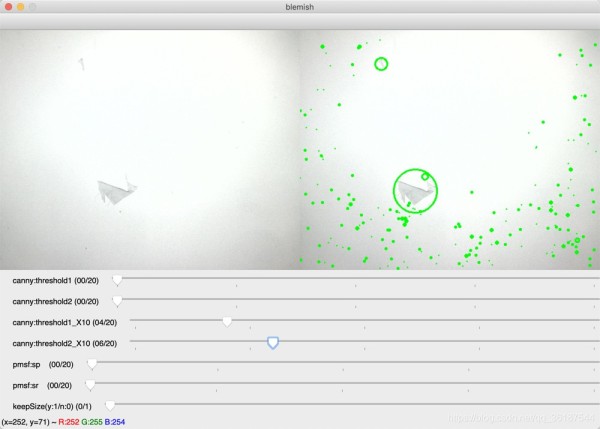
程序效果(通过设置不同阈值,得到不同结果):

百度云链接:链接:https://pan.baidu.com/s/1LXrQnhO5UGTw-3H8P86apw 密码:61yx
进入正文
目录
1、算法方案
2、详细步骤与说明
3、代码说明
1、算法方案
切图并透视变换明度预处理,并计算gamma值均值漂移:目的在于剔除一些噪声canny:边缘检测findContours:寻找边缘最小外接圆:绘制每个边缘的最小外接圆2、详细步骤与说明
由于图片是双目拍摄,所以是上下两部分,程序先做了切图,将图片切割为上下两部分,再通过透视变换矫正图片。
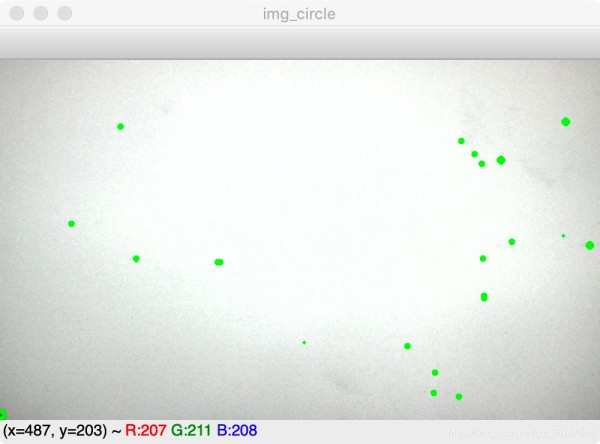
紧接着是亮度预处理,原因:不同的光照环境下拍摄出来的图片将有较大的差异,所以做了下亮度矫正。同时发现问题,下图为同一张图像在不同光照下得到结果并检测灰尘,从左到右为亮度越来越亮的图片,可见越暗的图片进行亮度调整后周围暗部越深。导致在同阈值的情况下检测出的结果不相同。所以这里计算了gamma值,gamma越大,图片越亮,需要的阈值应该越小,但是这里没有找到其对应关系。后续可以固定亮度值保证结果。

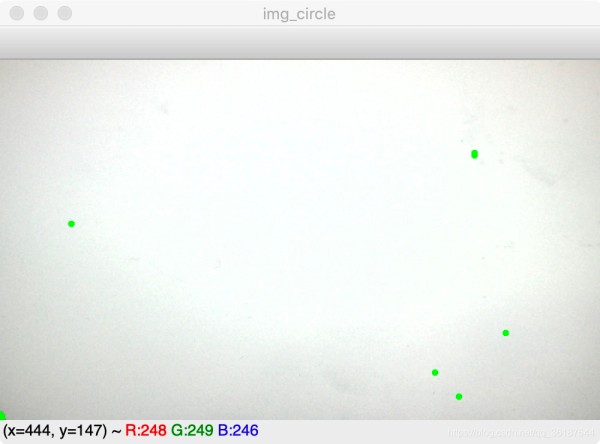
其后再采用算法步骤:均值漂移、canny,findContours寻找边缘绘制外接圆。
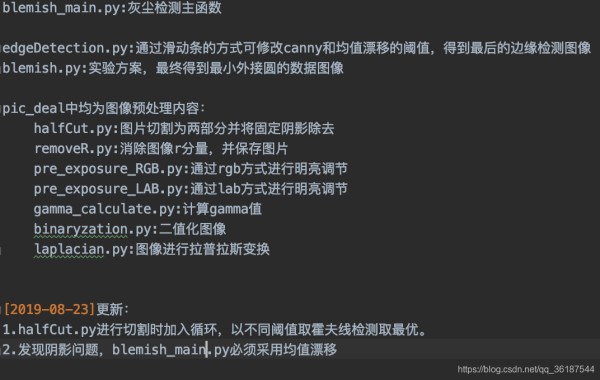
3、代码说明
代码目录:
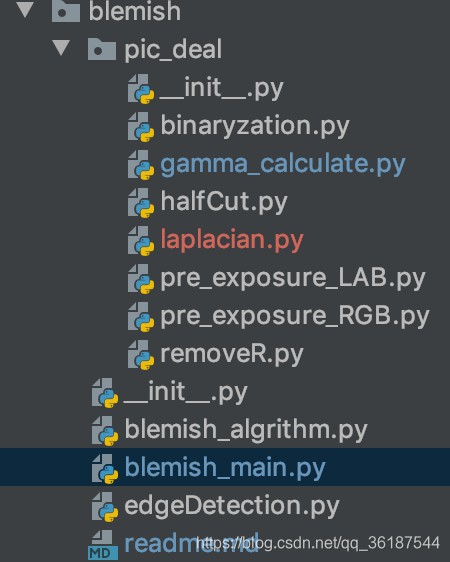
说明: