在开设新账户前研究其信誉和服务 #生活技巧# #财务管理技巧# #金融账户管理#

欣佰特cnbestec 已于 2024-12-27 21:05:03 修改
于 2024-12-27 18:29:24 首次发布
版权声明:本文为博主原创文章,遵循 CC 4.0 BY 版权协议,转载请附上原文出处链接和本声明。
在科技日新月异的今天,机器人技术在家庭场景中的应用逐渐成为现实,改变着我们的生活方式。今天,我们将深入探讨一篇关于家用机器人研究的论文,剖析其中的创新成果,
论文引用链接:http://tidybot2.github.io
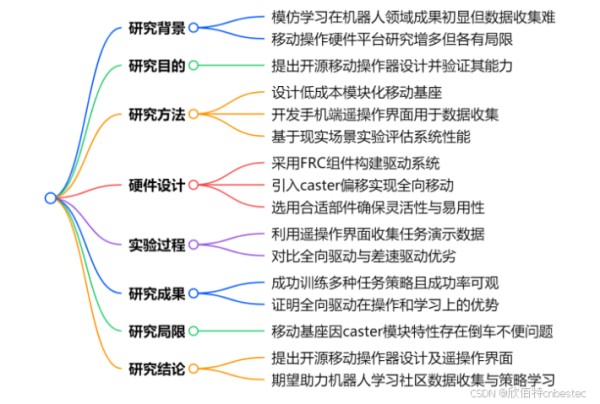
研究背景与挑战
机器人模仿学习在现实应用中受数据匮乏制约,尤其是移动操作领域,缺乏合适研究硬件,现有商业移动基座存在尺寸大、不适合家用、运动学受限等问题。旨在设计开源、低成本、灵活且适用于家庭环境的移动操作器,解决数据收集难题,推动机器人在家庭场景的应用。 创新设计:移动操作器全向移动基座 采用动力脚轮驱动机制实现全向移动,基于 FRC 组件构建驱动系统,通过修改 SDS MK4 旋转模块引入 caster 偏移,使机器人能独立控制三个自由度,提升机动性和操作灵活性。 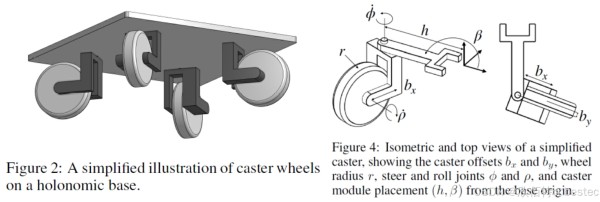
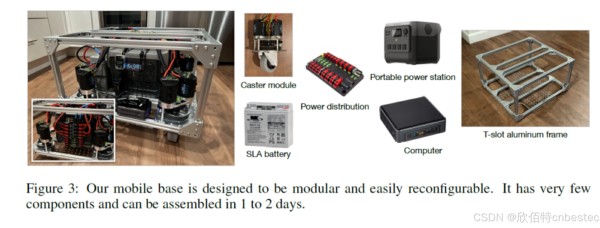
选用标准铝制 T 型槽挤压框架,便于调整尺寸和形状;采用便携式电源站供电,确保各部件兼容性和灵活性;设计高度模块化,方便修改和添加部件,如支持不同机械臂和传感器的安装。 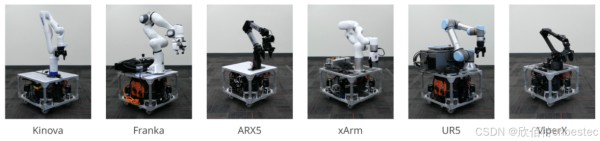
移动基座重 34kg,搭配 Kinova Gen3 机械臂(重 12kg),最大有效载荷约 60kg,运行时长达 8 小时,适用于多种室内地面,移动精度高(平移漂移 < 1cm/m,旋转漂移 < 1°/360°)。 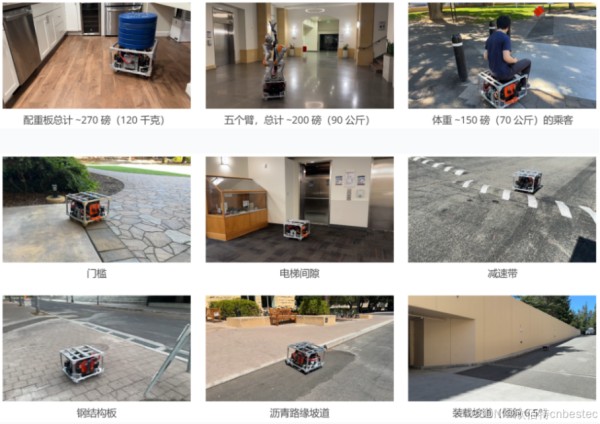
便捷的数据收集:手机遥操作界面 
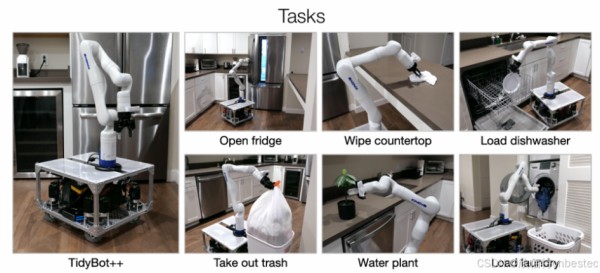
开发基于手机的遥操作界面,利用 WebXR API 传输手机姿态信息,映射为机器人运动指令,无需额外遥操作设备,降低成本并提高灵活性。通过该界面收集多种家庭任务演示数据,实验表明 50 - 100 次演示数据即可训练机器人成功完成任务,如打开冰箱、擦拭台面等,成功率可观。 任务场景介绍:
厨房任务 食材处理:需精准识别并处理各类食材,按烹饪要求切割蔬菜,对位置控制和力感知要求高。
餐具操作:准确收集、分类并放置餐具,要考虑餐具特性与空间布局。
客厅任务 物品整理:识别并整理散落物品,依据形状、材质确定策略并分类存放。
设备操控:精确操作电子设备遥控器或触摸屏,难度较大。
卧室任务 衣物管理:识别衣物类型后折叠整理,避免褶皱并整齐放置。
物品递送:依指令拿取物品并根据用户情况调整递送。
操作控制训练要素
传感器数据利用:位置、力和视觉传感器为机器人提供关键信息。运动规划与优化:综合多因素规划最优轨迹并优化。学习策略应用:强化学习与模仿学习助力机器人掌握任务技能。 Kinova 机械臂Gen3-7Dof在此研究应用中的关键作用 
高精度运动控制:7 个自由度实现灵活精确运动,助力机器人模拟人类动作,提升抓取微小物品或精细操作的成功率。力反馈与自适应调整:力传感器提供实时反馈,机器人依此感知力变化,调整力度与动作。如抓取易碎物时防损坏,装配时确保精度与稳定性。灵活任务适应能力:多自由度设计适应不同任务,从厨房食材处理到卧室衣物折叠,能对各类物体有效操作,支持多场景应用,加快适应多样化任务训练。 研究的意义与展望 开源设计促进机器人学习社区发展,使更多研究者能开展移动操作研究,有望推动家用机器人技术的广泛应用,提升生活便利性。未来可改进移动基座倒车性能,进一步优化机械臂功能,拓展机器人在家庭及其他场景的应用能力,如增强感知和决策能力以应对复杂情况。
文章引用链接:TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning
网址:Kinova在开源家庭服务机器人TidyBot++研究里大展身手 https://www.yuejiaxmz.com/news/view/721752
相关内容
TidyBot: 利用大语言模型实现个性化家居整理的智能机器人助手家政服务——机器人涉足的新领域能帮我们做家务的机器人,真的来了!家庭助老服务机器人研究与设计家务机器人最新资讯家庭服务机器人论文资源家庭服务机器人好在哪里家庭服务机器人 智能生活好帮手—新浪家居国内首款家庭服务人形机器人「夸父」开源在线客服机器人
随便看看

